graphslam
.. image:: https://github.com/JeffLIrion/python-graphslam/actions/workflows/python-package.yml/badge.svg?branch=master
:target: https://github.com/JeffLIrion/python-graphslam/actions/workflows/python-package.yml
.. image:: https://coveralls.io/repos/github/JeffLIrion/python-graphslam/badge.svg?branch=master
:target: https://coveralls.io/github/JeffLIrion/python-graphslam?branch=master
Documentation for this package can be found at https://python-graphslam.readthedocs.io/.
This package implements a Graph SLAM solver in Python.
Features
- Optimize
R^2, R^3, SE(2), and SE(3) datasets
- Analytic Jacobians
- Supports odometry and landmark edges
- Supports custom edge types (see
tests/test_custom_edge.py <https://github.com/JeffLIrion/python-graphslam/blob/master/tests/test_custom_edge.py>_ for an example)
- Import and export .g2o files
Installation
.. code-block::
pip install graphslam
Example Usage
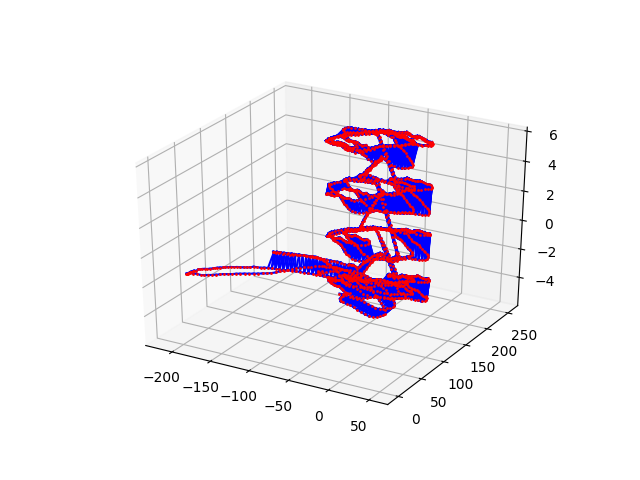
SE(3) Dataset
^^^^^^^^^^^^^
.. code-block:: python
from graphslam.graph import Graph
g = Graph.from_g2o("data/parking-garage.g2o") # https://lucacarlone.mit.edu/datasets/
g.plot(vertex_markersize=1)
g.calc_chi2()
16720.02100546733
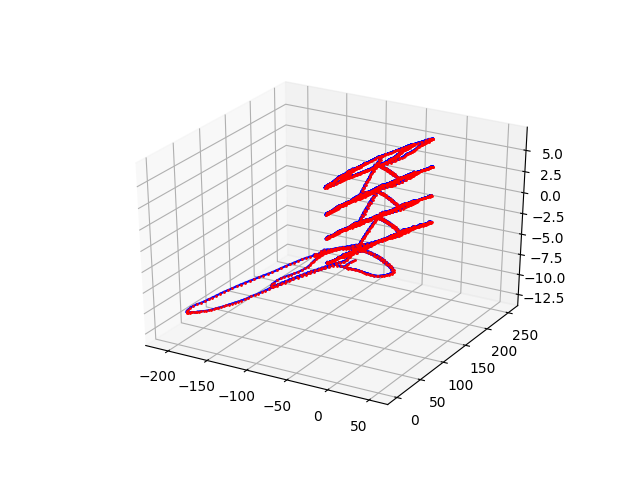
g.optimize()
g.plot(vertex_markersize=1)
Output:
::
Iteration chi^2 rel. change
0 16720.0210
1 45.6644 -0.997269
2 1.2936 -0.971671
3 1.2387 -0.042457
4 1.2387 -0.000001
+-----------------------------------------------------------------------------------------------------------------------+---------------------------------------------------------------------------------------------------------------------------------+
| Original | Optimized |
+-----------------------------------------------------------------------------------------------------------------------+---------------------------------------------------------------------------------------------------------------------------------+
| .. image:: https://raw.githubusercontent.com/JeffLIrion/python-graphslam/master/docs/source/images/parking-garage.png | .. image:: https://raw.githubusercontent.com/JeffLIrion/python-graphslam/master/docs/source/images/parking-garage-optimized.png |
+-----------------------------------------------------------------------------------------------------------------------+---------------------------------------------------------------------------------------------------------------------------------+
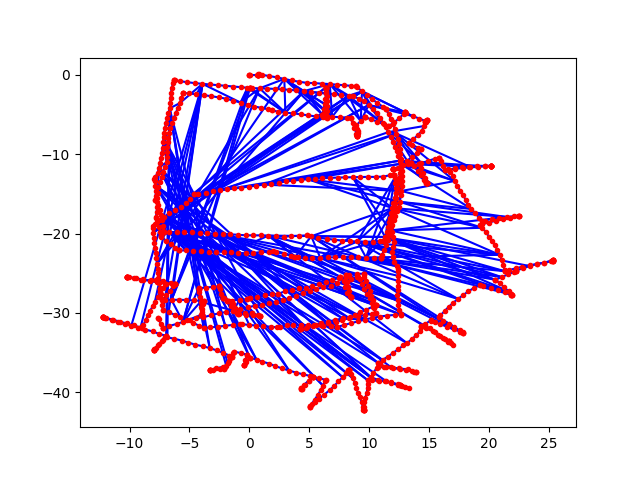
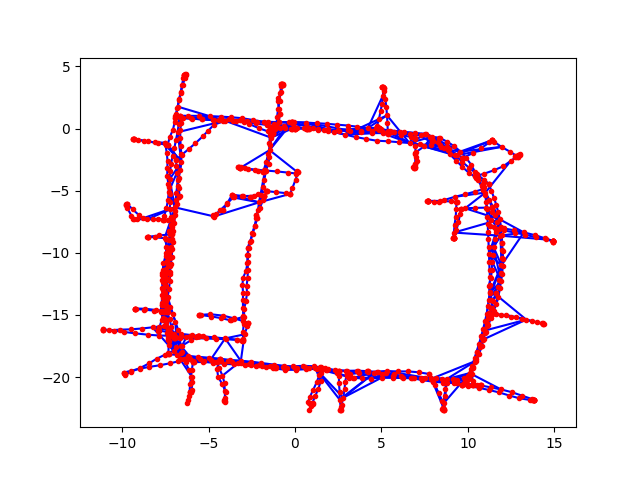
SE(2) Dataset
^^^^^^^^^^^^^
.. code-block:: python
from graphslam.graph import Graph
g = Graph.from_g2o("data/input_INTEL.g2o") # https://lucacarlone.mit.edu/datasets/
g.plot()
g.calc_chi2()
7191686.382493544
g.optimize()
g.plot()
Output:
::
Iteration chi^2 rel. change
0 7191686.3825
1 319950425.6477 43.488929
2 124950341.8035 -0.609470
3 338165.0770 -0.997294
4 734.7343 -0.997827
5 215.8405 -0.706233
6 215.8405 -0.000000
+--------------------------------------------------------------------------------------------------------------------+------------------------------------------------------------------------------------------------------------------------------+
| Original | Optimized |
+--------------------------------------------------------------------------------------------------------------------+------------------------------------------------------------------------------------------------------------------------------+
| .. image:: https://raw.githubusercontent.com/JeffLIrion/python-graphslam/master/docs/source/images/input_INTEL.png | .. image:: https://raw.githubusercontent.com/JeffLIrion/python-graphslam/master/docs/source/images/input_INTEL-optimized.png |
+--------------------------------------------------------------------------------------------------------------------+------------------------------------------------------------------------------------------------------------------------------+
References and Acknowledgments
- Grisetti, G., Kummerle, R., Stachniss, C. and Burgard, W., 2010.
A tutorial on graph-based SLAM <http://domino.informatik.uni-freiburg.de/teaching/ws10/praktikum/slamtutorial.pdf>_. IEEE Intelligent Transportation Systems Magazine, 2(4), pp.31-43.
- Blanco, J.L., 2010.
A tutorial on SE(3) transformation parameterizations and on-manifold optimization <http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.468.5407&rep=rep1&type=pdf>_. University of Malaga, Tech. Rep, 3.
- Carlone, L., Tron, R., Daniilidis, K. and Dellaert, F., 2015, May.
Initialization techniques for 3D SLAM: a survey on rotation estimation and its use in pose graph optimization <https://smartech.gatech.edu/bitstream/handle/1853/53710/Carlone15icra.pdf>_. In 2015 IEEE international conference on robotics and automation (ICRA) (pp. 4597-4604). IEEE.
- Carlone, L. and Censi, A., 2014.
From angular manifolds to the integer lattice: Guaranteed orientation estimation with application to pose graph optimization <https://arxiv.org/pdf/1211.3063.pdf>_. IEEE Transactions on Robotics, 30(2), pp.475-492.
Thanks to Luca Larlone for allowing inclusion of the Intel and parking garage datasets <https://lucacarlone.mit.edu/datasets/>_ in this repo.
Live Coding Graph SLAM in Python
If you're interested, you can watch as I coded this up.
Live coding Graph SLAM in Python (Part 1) <https://youtu.be/yXWkNC_A_YE>_Live coding Graph SLAM in Python (Part 2) <https://youtu.be/M2udkF0UNUg>_Live coding Graph SLAM in Python (Part 3) <https://youtu.be/CiBdVcIObVU>_Live coding Graph SLAM in Python (Part 4) <https://youtu.be/GBAThis-_wM>_Live coding Graph SLAM in Python (Part 5) <https://youtu.be/J3NyieGVwIw>_


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}