Security News
Crates.io Users Targeted by Phishing Emails
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
By Sarah Gooding - Sep 12, 2025
@foxglove/ros2idl-parser
Advanced tools
ROS 2
.idlmessage definition parser

The Robot Operating System (ROS) defines a supported subset of OMG IDL for describing data types. This library parses those message definitions and can round trip them back into a canonical string format suitable for checksum generation. The parsed definitions are useful for serialization or deserialization when paired with other libraries.
import { parseRos2idl } from "@foxglove/ros2idl-parser";
const ros2idlDefinitionStr = `
================================================================================
IDL: geometry_msgs/msg/Pose
module geometry_msgs {
module msg {
struct Pose {
geometry_msgs::msg::Point position;
geometry_msgs::msg::Quaternion orientation;
};
};
};
================================================================================
IDL: geometry_msgs/msg/Point
module geometry_msgs {
module msg {
struct Point {
double x;
double y;
double z;
};
};
};
================================================================================
IDL: geometry_msgs/msg/Quaternion
module geometry_msgs {
module msg {
struct Quaternion {
double x;
double y;
double z;
double w;
};
};
};
`;
const messageDefinition = parseRos2idl(ros2idlDefinitionStr);
// print the parsed message definition structure
console.log(JSON.stringify(messageDefinition, null, 2));
Prints:
[
{
"definitions": [
{
"type": "geometry_msgs/msg/Point",
"isArray": false,
"name": "position",
"isComplex": true
},
{
"type": "geometry_msgs/msg/Quaternion",
"isArray": false,
"name": "orientation",
"isComplex": true
}
]
},
{
"name": "geometry_msgs/msg/Point",
"definitions": [
{
"type": "float64",
"isArray": false,
"name": "x",
"isComplex": false
},
{
"type": "float64",
"isArray": false,
"name": "y",
"isComplex": false
},
{
"type": "float64",
"isArray": false,
"name": "z",
"isComplex": false
}
]
},
{
"name": "geometry_msgs/msg/Quaternion",
"definitions": [
{
"type": "float64",
"isArray": false,
"name": "x",
"isComplex": false
},
{
"type": "float64",
"isArray": false,
"name": "y",
"isComplex": false
},
{
"type": "float64",
"isArray": false,
"name": "z",
"isComplex": false
},
{
"type": "float64",
"isArray": false,
"name": "w",
"isComplex": false
}
]
}
]
Join our Slack channel to ask questions, share feedback, and stay up to date on what our team is working on.
FAQs
Parser for ROS 2 IDL message definitions
The npm package @foxglove/ros2idl-parser receives a total of 1,639 weekly downloads. As such, @foxglove/ros2idl-parser popularity was classified as popular.
We found that @foxglove/ros2idl-parser demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 2 open source maintainers collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
Product
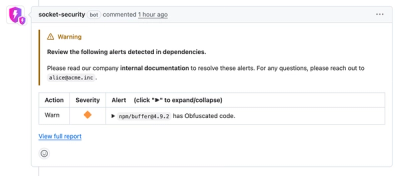
Socket now lets you customize pull request alert headers, helping security teams share clear guidance right in PRs to speed reviews and reduce back-and-forth.

Product
Socket's Rust support is moving to Beta: all users can scan Cargo projects and generate SBOMs, including Cargo.toml-only crates, with Rust-aware supply chain checks.