Product
Introducing Module Reachability: Focus on the Vulnerabilities That Matter
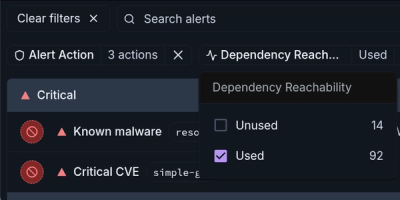
Module Reachability filters out unreachable CVEs so you can focus on vulnerabilities that actually matter to your application.
By Trevor Norris - Apr 23, 2025
An interface between Python and AutonoWar
Documentation (AutonoWar v0.1.3, abrconnection v0.1.0):
Coordinate system is left-handed, with x being east, y being upwards, and z being north.
RobotConnection(): class which handles connection to the game. Should be instantiated at beginning of script, and method connect() should be called immediately after. disconnect() ends connection.
RobotConnection.set_tire_torque(tire_name, torque): sets torque of tire tire_name to torque. Current tire names are "BackLeft", "BackRight", "FrontLeft", and "FrontRight."
RobotConnection.set_tire_steering(tire_name, bering): sets tire tire_name to bering. All angles/berings are clockwise off of vertical (unity's coordinate system is left-handed).
RobotConnection.sensors: Dictionary/Hashtable containing information about the state of the robot.
Vectors are stored as dictionaries with keys "x", "y", and "z".
sensors["gps"]: Sensor containing position information of the robot.
sensors["gps"]["position"]: Vector containing current position of robot relative to starting point.sensors["gyroscope"]: Sensor containing rotation information of the robot:
sensors["gyroscope"]["right"]: Unit vector pointing right RELATIVE to the robot. For example, if the robot was facing in the default direction, its right vector would be <1, 0, 0> because its right direction is east. If the robot turned 90 degees counterclockwise, its right vector would be <0, 0, 1>. If the robot was facing a bering of 45 degrees and was climbing a 20 degree grade, its right vector would be <cos(45), sin(20), sin(45)> / sqrt(cos(45)^2 + sin(20)^2 + sin(45)^2).
sensors["gyroscope"]["up"]: Unit vector pointing up RELATIVE to the robot. Same idea as before.
sensors["gyroscope"]["forward"]: Unit vector pointing up RELATIVE to the robot. Same idea as before.
sensors["lidar"]["distanceArray"]: Array containing distance to any object at 1 degree increments. state_dict["lidar"]["distanceArray"][0] would describe how many meters of clearance the robot has in front of itself, state_dict["lidar"]["distanceArray"][90] would describe its clearance to the right, and so on. If the robot has more than 100 meters of clearance in a particular direction, the value will capped at 100. In future updates, lidar upgrades might include an increase in range or density for in-game currency. Vertical FOV will be coming soon.
sensors["radar"]["pings"]: array of vectors representing opponent locations
sensors["altimeter"]["altitude"]: distance to ground in world space (i.e. NOT normal to robot)
FAQs
An interface between Python and AutonoWar
We found that awconnection demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Product
Module Reachability filters out unreachable CVEs so you can focus on vulnerabilities that actually matter to your application.

Company News
Socket is bringing best-in-class reachability analysis into the platform — cutting false positives, accelerating triage, and cementing our place as the leader in software supply chain security.
Product
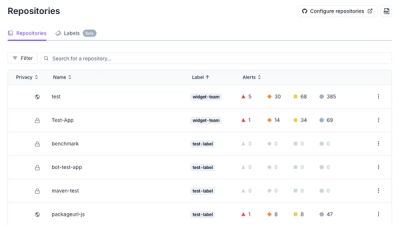
Socket is introducing a new way to organize repositories and apply repository-specific security policies.