Product
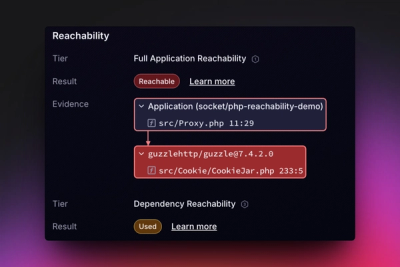
Introducing Reachability for PHP
Reachability analysis for PHP is now available in experimental, helping teams identify which vulnerabilities are actually exploitable.
By Benjamin Barslev - Apr 24, 2026
betterosi
Advanced tools
betterosi - a python library for reading and writing open-simulation-interface files using betterproto2
![]()

![]()


A python library for reading and writing ASAM OSI (Open-Simulation-Interace) files (either .osi binary traces or MCAP files) using betterproto2 instead of the default protobuf generated code (better typing and enum support).
betterosi.Writer and betterosi.read.betterosi-viewer <filepath.mcap / filepath.osi>(adapted from esmini)betterosi-to-mcap <filepath to osi>.The library uses code from esmini (betterosi/viewer.py) under MPL 2.0 license and the code from open-simulation-interface to read osi traces (betterosi/osi3trace.py).
The library uses code generation of python-betterproto2-compiler to generate python code from the protobuf definitions of open-simulation-interface.
Since OSI and esmini are under MPL, also this repository is published under MPL-2.0 license.
The proto definitions extend the OSI 3.7.0 definitions in the following ways:
MapAsamOpenDrive Message: Packages the XML content of an ASAM OpenDRIVE map in a proto MessageSee omega-prime for details.
pip install betterosi
To create an OSI or MCAP trace, you need to use betterosi.Writer. After creating the OSI Message of your desire, just add it to the Writer as shown in the examples below for either MCAP traaces or OSI traces.
import betterosi
with betterosi.Writer('test.mcap') as writer:
gt = betterosi.GroundTruth(...)
writer.add(gt)
with betterosi.Writer('test.osi') as writer:
sv = betterosi.SensorView(...)
writer.add(sv)
Below a full example is given which creates three files, and MCAP trace and and OSI trace with GroundTruth messages and a MCAP trace of SensorViews. If you use the code, you obviously just need one of the writers.
import betterosi
NANOS_PER_SEC = 1_000_000_000
with betterosi.Writer('test.mcap') as writer_mcap, betterosi.Writer('test.osi') as writer_osi, betterosi.Writer('test_sv.mcap') as writer_sv:
moving_object = betterosi.MovingObject(id=betterosi.Identifier(value=42),
type = betterosi.MovingObjectType.UNKNOWN,
base=betterosi.BaseMoving(
dimension= betterosi.Dimension3D(length=5, width=2, height=1),
position = betterosi.Vector3D(x=0, y=0, z=0),
orientation = betterosi.Orientation3D(roll = 0.0, pitch = 0.0, yaw = 0.0),
velocity = betterosi.Vector3D(x=1, y=0, z=0)
))
gt = betterosi.GroundTruth(
version=betterosi.InterfaceVersion(version_major= 3, version_minor=7, version_patch=0),
timestamp=betterosi.Timestamp(seconds=0, nanos=0),
moving_object=[
moving_object
],
host_vehicle_id=betterosi.Identifier(value=0)
)
sv = betterosi.SensorView(
version=betterosi.InterfaceVersion(version_major= 3, version_minor=7, version_patch=0),
timestamp=betterosi.Timestamp(seconds=0, nanos=0),
global_ground_truth=gt,
host_vehicle_id=betterosi.Identifier(value=0)
)
# Generate 1000 OSI messages for a duration of 10 seconds
for i in range(1000):
total_nanos = i*0.01*NANOS_PER_SEC
gt.timestamp.seconds = int(total_nanos // NANOS_PER_SEC)
gt.timestamp.nanos = int(total_nanos % NANOS_PER_SEC)
moving_object.base.position.x += 0.5
sv.timestamp = gt.timestamp
writer_mcap.add(gt)
writer_osi.add(gt)
writer_sv.add(sv)
When writing MCAP messages you can specifiy the topic in the writer and the add function by setting the topic argument. When reading such files, set the argument mcap_topic to the same string.
With betterosi.read you can read an mcap or osi trace. read returns a generator. With the following code, you can get a list of the GroundTruth messages from a trace, even if the GroundTruth are nested inside SensorViews. It works the same for OSI traces.
import betterosi
ground_truths = list(betterosi.read('test_sv.mcap', return_ground_truth=True))
print([len(ground_truths), ground_truths[0]])
Above code prints the following:
[1000, GroundTruth(version=InterfaceVersion(version_major=3, version_minor=7), timestamp=Timestamp(), host_vehicle_id=Identifier(), moving_object=[MovingObject(id=Identifier(value=42), base=BaseMoving(dimension=Dimension3D(length=5.0, width=2.0, height=1.0), position=Vector3D(x=0.5), orientation=Orientation3D(), velocity=Vector3D(x=1.0)))])]
If you want a list of the sensor views directly:
import betterosi
sensor_views = betterosi.read('test_sv.mcap', return_sensor_view=True)
print(next(sensor_views))
The above prints:
SensorView(version=InterfaceVersion(version_major=3, version_minor=7), timestamp=Timestamp(), global_ground_truth=GroundTruth(version=InterfaceVersion(version_major=3, version_minor=7), timestamp=Timestamp(), host_vehicle_id=Identifier(), moving_object=[MovingObject(id=Identifier(value=42), base=BaseMoving(dimension=Dimension3D(length=5.0, width=2.0, height=1.0), position=Vector3D(x=0.5), orientation=Orientation3D(), velocity=Vector3D(x=1.0)))]), host_vehicle_id=Identifier())
If you want to read any OSI trace, you just need to give the filename.
import betterosi
any_osi_message = betterosi.read('test.osi')
any_osi_message = betterosi.read('test.mcap')
pip install grpcio-tools betterproto2_compiler
python gen_protos.py
cd into osi-proto and run the following command to generate the code
cd osi-proto
mkdir ../betterosi/generated
python -m grpc_tools.protoc -I . --python_betterproto2_out=../betterosi/generated --python_betterproto2_opt=google_protobuf_descriptors osi_common.proto osi_datarecording.proto osi_detectedlane.proto osi_detectedobject.proto osi_detectedoccupant.proto osi_detectedroadmarking.proto osi_detectedtrafficlight.proto osi_detectedtrafficsign.proto osi_environment.proto osi_featuredata.proto osi_groundtruth.proto osi_hostvehicledata.proto osi_lane.proto osi_logicaldetectiondata.proto osi_logicallane.proto osi_motionrequest.proto osi_object.proto osi_occupant.proto osi_referenceline.proto osi_roadmarking.proto osi_route.proto osi_sensordata.proto osi_sensorspecific.proto osi_sensorview.proto osi_sensorviewconfiguration.proto osi_streamingupdate.proto osi_trafficcommand.proto osi_trafficcommandupdate.proto osi_trafficlight.proto osi_trafficsign.proto osi_trafficupdate.proto osi_version.proto osi_mapasamopendrive.proto
This code is published under MPL-2.0 license. It utilizes and modifies parts of esmini (betterosi/viewer.py) under MPL-2.0 and open-simulation-interface osi-proto/* under MPL-2.0.
This package is developed as part of the SYNERGIES project.

Funded by the European Union. Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union or European Climate, Infrastructure and Environment Executive Agency (CINEA). Neither the European Union nor the granting authority can be held responsible for them.

[!IMPORTANT] The project is open-sourced and maintained by the Institute for Automotive Engineering (ika) at RWTH Aachen University. We cover a wide variety of research topics within our Vehicle Intelligence & Automated Driving domain. If you would like to learn more about how we can support your automated driving or robotics efforts, feel free to reach out to us! :email: opensource@ika.rwth-aachen.de
FAQs
betterosi - a python library for reading and writing open-simulation-interface files using betterproto2
We found that betterosi demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 2 open source maintainers collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Product
Reachability analysis for PHP is now available in experimental, helping teams identify which vulnerabilities are actually exploitable.
Product
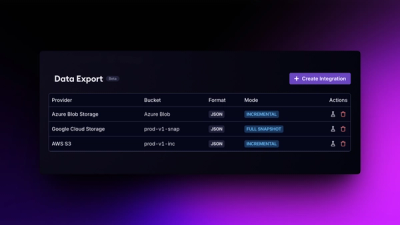
Export Socket alert data to your own cloud storage in JSON, CSV, or Parquet, with flexible snapshot or incremental delivery.
Research
/Security News
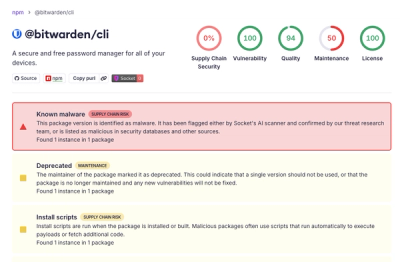
Bitwarden CLI 2026.4.0 was compromised in the Checkmarx supply chain campaign after attackers abused a GitHub Action in Bitwarden’s CI/CD pipeline.