Security News
Crates.io Users Targeted by Phishing Emails
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
By Sarah Gooding - Sep 12, 2025
A toolbox for LiDAR point cloud data, providing point cloud transformations, point cloud augmentation, realistic weather simulation and 2D & 3D AP evaluation, with an easy-to-use Python API. This module supports several essential tasks for the development of LiDAR-based perception methods in automated driving.
A toolbox for LiDAR point cloud data, providing point cloud transformations, point cloud augmentation, realistic weather simulation and 2D & 3D AP evaluation, with an easy-to-use Python API. This module supports several essential tasks for the development of LiDAR-based perception methods in automated driving.
First clone and enter the repository:
git clone https://github.com/ekut-es/LidarAug && cd LidarAug
The following dependencies are necessary to build and test the C++ library for development:
It is also necessary to set the environment variable TORCH_PATH to point to where libtorch is installed on your
system.
After that, just run make ctest to compile the library and run google test.
Note that the tests written for the backend include some controlled RNG tests which might fail on different platforms with different architectures such as the Apple MX chips. The tests were developed for Linux x86 using GCC.
The following dependencies are necessary to install the Python module:
To use the Python module, just run make install after cloning and entering the repository.
To test the python functions/wrappers, install pytest (pip install pytest) and
run make testpy.
The required Python version is 3.11.
The lidar_aug Python module contains 5 submodules:
transformations contains any C++ enums, structs and functions that have bindings and are used for transformations.
weather_simulations contains any C++ enums, structs and functions that have bindings and are used for weather
simulations.
augmentations contains the Python wrappers for any C++ function (weather simulation or transformation).
evaluation contains (C++) function to evaluate the accuracy of bounding boxes.
This can be done for 2D and 3D bounding boxes.
point_cloud contains things that is specific to point clouds that is used across modules and functionally not
specific to the task of one of those.
Such as the IntensityRange enum that is used to set/determine the maximum intensity of the points in a point cloud.
Alternatively the module can be run inside a Docker container.
After installing Docker and cloning the repository, all you need to do is run make docker,
which will start building the image and automatically run the tests during the build process.
NOTE: If you're running the docker image on ARM run make docker-arm instead.
FAQs
A toolbox for LiDAR point cloud data, providing point cloud transformations, point cloud augmentation, realistic weather simulation and 2D & 3D AP evaluation, with an easy-to-use Python API. This module supports several essential tasks for the development of LiDAR-based perception methods in automated driving.
We found that lidar-aug demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
Product
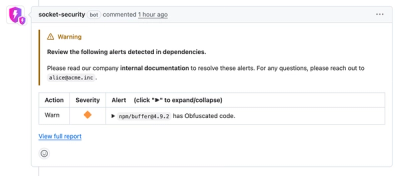
Socket now lets you customize pull request alert headers, helping security teams share clear guidance right in PRs to speed reviews and reduce back-and-forth.

Product
Socket's Rust support is moving to Beta: all users can scan Cargo projects and generate SBOMs, including Cargo.toml-only crates, with Rust-aware supply chain checks.