
Research
Malicious fezbox npm Package Steals Browser Passwords from Cookies via Innovative QR Code Steganographic Technique
A malicious package uses a QR code as steganography in an innovative technique.
By Olivia Brown - Sep 22, 2025
This simple Library should help you controlling the TELLO EDU over WiFi with Python
Tested on Windows 10.
You can install this Library via PIP:
pip install tello
If you don't want to install the library via PIP, you can move the tello.py file to your working directory.
from tello import tello
drone = tello(port=8890, ip="192.168.10.1")
Optional. Sets the port for controlling Tello and reading Data. Default is 8890.
Optional. The IP adress for controlling Tello and reading Data. Default is 192.168.10.1.
import tello
drone = tello.tello(port=8890, ip="192.168.10.1")
#### Port
Optional. Sets the port for controlling Tello and reading Data. Default is 8890.
#### IP
Optional. The IP adress for controlling Tello and reading Data. Default is 192.168.10.1.
## Methods
### Send a Command to the Drone
```python
drone.cmd(command)
You can send a command like up 99 to the drone with drone.cmd()
Required. The Command to send to the drone.
drone.takeoff()
Auto takeoff
drone.land()
Auto landing.
drone.setSpeed(speed)
Set the speed of the drone in cm/s.
Required. The Speed to set. Has to be between 10 and 100.
drone.up(distance)
Required. The distance to ascend in cm. Has to be between 20 and 500.
drone.down(distance)
Required. The distance to descend in cm. Has to be between 20 and 500.
drone.forward(distance)
Required. The distance to fly forward in cm. Has to be between 20 and 500.
drone.backward(distance)
Required. The distance to fly backward in cm. Has to be between 20 and 500.
drone.right(distance)
Required. The distance to fly right in cm. Has to be between 20 and 500.
drone.left(distance)
Required. The distance to fly left in cm. Has to be between 20 and 500.
drone.flip(direction)
Required. The flip direction. Has to be r (for right), l (for left), f (for forward) or b (for backward).
drone.rotate(direction, degrees)
Required. The rotating direction. Can be cw (for clockwise) or ccw (for counterclockwise)
Required. The number of degrees to rotate. Has to be between 1 and 360.
drone.MPR()
Starts the MissionPad Registrator in a new Thread. This is a Function for registrating MissionPads in both directions (forward and downward). When a MissionPad is found, it will be added to drone.missionpads (Dictionary). drone.missionpads will look like that:
{
"1":
{
"x-position": 0
"y-position": 0
"z-position": 0
}
"8":
{
"x-position": 5
"y-position": -3
"z-position": 12
}
}
If no MissionPad has been found, this dictionary will be empty. You should be able to send other Commands to the drone while MPR is looking for MissionPads. Every time a new MissionPad has been found, a Text with the ID and the x-, y- and z-position will be printed to the Shell.
drone.goToMP(mid[, speed=100])
You have to start MPR to use this Method. If the MissionPad isn't registrated in drone.missionpads, a Exception will raise.
Required. The ID of the Mission Pad.
Optional. The speed to fly to thy MissionPad. Default is 100.
FAQs
This simple Library should help you controlling the TELLO EDU over WiFi with Python.
We found that tello demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Research
A malicious package uses a QR code as steganography in an innovative technique.
Research
/Security News
Socket identified 80 fake candidates targeting engineering roles, including suspected North Korean operators, exposing the new reality of hiring as a security function.
Application Security
/Research
/Security News
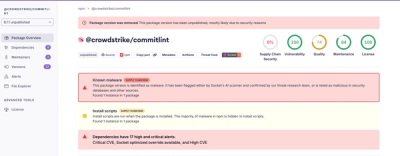
Socket detected multiple compromised CrowdStrike npm packages, continuing the "Shai-Hulud" supply chain attack that has now impacted nearly 500 packages.