
Research
PyPI Package Disguised as Instagram Growth Tool Harvests User Credentials
A deceptive PyPI package posing as an Instagram growth tool collects user credentials and sends them to third-party bot services.
By Kush Pandya - Jun 06, 2025
![]()
![]()

![]()
![]()
![]()
Warp is a Python framework for writing high-performance simulation and graphics code. Warp takes regular Python functions and JIT compiles them to efficient kernel code that can run on the CPU or GPU.
Warp is designed for spatial computing and comes with a rich set of primitives that make it easy to write programs for physics simulation, perception, robotics, and geometry processing. In addition, Warp kernels are differentiable and can be used as part of machine-learning pipelines with frameworks such as PyTorch, JAX and Paddle.
Please refer to the project Documentation for API and language reference and CHANGELOG.md for release history.

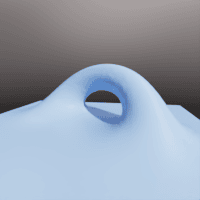
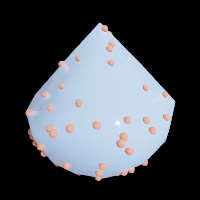
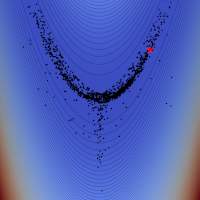
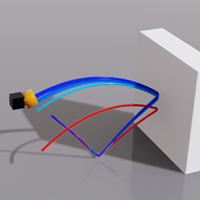
A selection of physical simulations computed with Warp
Python version 3.9 or newer is recommended. Warp can run on x86-64 and ARMv8 CPUs on Windows, Linux, and macOS. GPU support requires a CUDA-capable NVIDIA GPU and driver (minimum GeForce GTX 9xx).
The easiest way to install Warp is from PyPI:
pip install warp-lang
You can also use pip install warp-lang[extras] to install additional dependencies for running examples and USD-related features.
The binaries hosted on PyPI are currently built with the CUDA 12 runtime and therefore require a minimum version of the CUDA driver of 525.60.13 (Linux x86-64) or 528.33 (Windows x86-64).
If you require GPU support on a system with an older CUDA driver, you can build Warp from source or
install wheels built with the CUDA 11.8 runtime from the GitHub Releases page.
Copy the URL of the appropriate wheel file (warp-lang-{ver}+cu12-py3-none-{platform}.whl) and pass it to
the pip install command, e.g.
| Platform | Install Command |
|---|---|
| Linux aarch64 | pip install https://github.com/NVIDIA/warp/releases/download/v1.7.2/warp_lang-1.7.2+cu11-py3-none-manylinux2014_aarch64.whl |
| Linux x86-64 | pip install https://github.com/NVIDIA/warp/releases/download/v1.7.2/warp_lang-1.7.2+cu11-py3-none-manylinux2014_x86_64.whl |
| Windows x86-64 | pip install https://github.com/NVIDIA/warp/releases/download/v1.7.2/warp_lang-1.7.2+cu11-py3-none-win_amd64.whl |
The --force-reinstall option may need to be used to overwrite a previous installation.
Nightly builds of Warp from the main branch are available on the NVIDIA Package Index.
To install the latest nightly build, use the following command:
pip install -U --pre warp-lang --extra-index-url=https://pypi.nvidia.com/
Note that the nightly builds are built with the CUDA 12 runtime and are not published for macOS.
If you plan to install nightly builds regularly, you can simplify future installations by adding NVIDIA's package
repository as an extra index via the PIP_EXTRA_INDEX_URL environment variable. For example:
export PIP_EXTRA_INDEX_URL="https://pypi.nvidia.com"
This ensures the index is automatically used for pip commands, avoiding the need to specify it explicitly.
This applies to pre-built packages distributed on PyPI and GitHub and also when building Warp from source.
Note that building Warp with the --quick flag changes the driver requirements. The quick build skips CUDA backward compatibility, so the minimum required driver is determined by the CUDA Toolkit version. Refer to the latest CUDA Toolkit release notes to find the minimum required driver for different CUDA Toolkit versions (e.g., this table from CUDA Toolkit 12.6).
Warp checks the installed driver during initialization and will report a warning if the driver is not suitable, e.g.:
Warp UserWarning:
Insufficient CUDA driver version.
The minimum required CUDA driver version is 12.0, but the installed CUDA driver version is 11.8.
Visit https://github.com/NVIDIA/warp/blob/main/README.md#installing for guidance.
This will make CUDA devices unavailable, but the CPU can still be used.
To remedy the situation there are a few options:
An example first program that computes the lengths of random 3D vectors is given below:
import warp as wp
import numpy as np
num_points = 1024
@wp.kernel
def length(points: wp.array(dtype=wp.vec3),
lengths: wp.array(dtype=float)):
# thread index
tid = wp.tid()
# compute distance of each point from origin
lengths[tid] = wp.length(points[tid])
# allocate an array of 3d points
points = wp.array(np.random.rand(num_points, 3), dtype=wp.vec3)
lengths = wp.zeros(num_points, dtype=float)
# launch kernel
wp.launch(kernel=length,
dim=len(points),
inputs=[points, lengths])
print(lengths)
A few notebooks are available in the notebooks directory to provide an overview over the key features available in Warp.
To run these notebooks, jupyterlab is required to be installed using:
pip install jupyterlab
From there, opening the notebooks can be done with the following command:
jupyter lab ./notebooks
The warp/examples directory contains a number of scripts categorized under subdirectories
that show how to implement various simulation methods using the Warp API.
Most examples will generate USD files containing time-sampled animations in the current working directory.
Before running examples, users should ensure that the usd-core, matplotlib, and pyglet packages are installed using:
pip install warp-lang[extras]
These dependencies can also be manually installed using:
pip install usd-core matplotlib pyglet
Examples can be run from the command-line as follows:
python -m warp.examples.<example_subdir>.<example>
To browse the example source code, you can open the directory where the files are located like this:
python -m warp.examples.browse
Most examples can be run on either the CPU or a CUDA-capable device, but a handful require a CUDA-capable device. These are marked at the top of the example script.
USD files can be viewed or rendered inside NVIDIA Omniverse, Pixar's UsdView, and Blender. Note that Preview in macOS is not recommended as it has limited support for time-sampled animations.
Built-in unit tests can be run from the command-line as follows:
python -m warp.tests
 |  |  |  |
| dem | fluid | graph capture | marching cubes |
 |  |  |  |
| mesh | nvdb | raycast | raymarch |
 |  |  |  |
| sample mesh | sph | torch | wave |
 |  |  |  |
| diffusion 3d | mixed elasticity | apic fluid | streamlines |
 |  |  |  |
| convection diffusion | navier stokes | burgers | magnetostatics |
 |  |  |  |
| bounce | cloth throw | diffray | drone |
 |  |  |  |
| inverse kinematics | spring cage | trajectory | soft body properties |
 | |||
| fluid checkpoint |
 |  |  |  |
| cartpole | cloth | granular | granular collision sdf |
 |  |  |  |
| jacobian ik | quadruped | rigid chain | rigid contact |
 |  |  |  |
| rigid force | rigid gyroscopic | rigid soft contact | soft body |
 | |||
| cloth self contact |
 |  |  |
| mlp | nbody | walker |
For developers who want to build the library themselves, the following tools are required:
After cloning the repository, users should run:
python build_lib.py
Upon success, the script will output platform-specific binary files in warp/bin/.
The build script will look for the CUDA Toolkit in its default installation path.
This path can be overridden by setting the CUDA_PATH environment variable. Alternatively,
the path to the CUDA Toolkit can be passed to the build command as
--cuda_path="...". After building, the Warp package should be installed using:
pip install -e .
This ensures that subsequent modifications to the library will be reflected in the Python package.
Please see the following resources for additional background on Warp:
The underlying technology in Warp has been used in a number of research projects at NVIDIA including the following publications:
See the FAQ in the Warp documentation.
Problems, questions, and feature requests can be opened on GitHub Issues.
The Warp team also monitors the #warp forum on the public Omniverse Discord server, come chat with us!
For inquiries not suited for GitHub Issues or Discord, please email warp-python@nvidia.com.
Versions take the format X.Y.Z, similar to Python itself:
This is similar to Semantic Versioning but is less strict regarding backward compatibility. Like with Python, some breaking changes can be present between minor versions if well-documented and gradually introduced.
Note that prior to 0.11.0, this schema was not strictly adhered to.
Warp is provided under the Apache License, Version 2.0. Please see LICENSE.md for full license text.
Contributions and pull requests from the community are welcome. Please see the Contribution Guide for more information on contributing to the development of Warp.
Our PUBLICATIONS.md file lists academic and research publications that leverage the capabilities of Warp. We encourage you to add your own published work using Warp to this list.
To cite Warp itself in your own publications, please use the following BibTeX entry:
@misc{warp2022,
title = {Warp: A High-performance Python Framework for GPU Simulation and Graphics},
author = {Miles Macklin},
month = {March},
year = {2022},
note = {NVIDIA GPU Technology Conference (GTC)},
howpublished = {\url{https://github.com/nvidia/warp}}
}
FAQs
A Python framework for high-performance simulation and graphics programming
We found that warp-lang demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 4 open source maintainers collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Research
A deceptive PyPI package posing as an Instagram growth tool collects user credentials and sends them to third-party bot services.

Product
Socket now supports pylock.toml, enabling secure, reproducible Python builds with advanced scanning and full alignment with PEP 751's new standard.

Security News
Research
Socket uncovered two npm packages that register hidden HTTP endpoints to delete all files on command.