Security News
Crates.io Users Targeted by Phishing Emails
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
By Sarah Gooding - Sep 12, 2025
A Python implementation of the CANopen_ standard. The aim of the project is to support the most common parts of the CiA 301 standard in a simple Pythonic interface. It is mainly targeted for testing and automation tasks rather than a standard compliant master implementation.
The library supports Python 3.8 or newer.
The library is mainly meant to be used as a master.
Incomplete support for creating slave nodes also exists.
Install from PyPI_ using pip::
$ pip install canopen
Install from latest master on GitHub::
$ pip install https://github.com/canopen-python/canopen/archive/master.zip
If you want to be able to change the code while using it, clone it then install
it in develop mode_::
$ git clone https://github.com/canopen-python/canopen.git
$ cd canopen
$ pip install -e .
Unit tests can be run using the pytest_ framework::
$ pip install -r requirements-dev.txt
$ pytest -v
You can also use unittest standard library module::
$ python3 -m unittest discover test -v
Documentation can be found on Read the Docs:
http://canopen.readthedocs.io/en/latest/
It can also be generated from a local clone using Sphinx_::
$ pip install -r doc/requirements.txt
$ make -C doc html
This library supports multiple hardware and drivers through the python-can_ package.
See the list of supported devices <https://python-can.readthedocs.io/en/stable/configuration.html#interface-names>_.
It is also possible to integrate this library with a custom backend.
Here are some quick examples of what you can do:
The PDOs can be access by three forms:
1st: :code:node.tpdo[n] or :code:node.rpdo[n]
2nd: :code:node.pdo.tx[n] or :code:node.pdo.rx[n]
3rd: :code:node.pdo[0x1A00] or :code:node.pdo[0x1600]
The :code:n is the PDO index (normally 1 to 4). The second form of access is for backward compatibility.
.. code-block:: python
import canopen
# Start with creating a network representing one CAN bus
network = canopen.Network()
# Add some nodes with corresponding Object Dictionaries
node = canopen.RemoteNode(6, '/path/to/object_dictionary.eds')
network.add_node(node)
# Connect to the CAN bus
# Arguments are passed to python-can's can.Bus() constructor
# (see https://python-can.readthedocs.io/en/latest/bus.html).
network.connect()
# network.connect(interface='socketcan', channel='can0')
# network.connect(interface='kvaser', channel=0, bitrate=250000)
# network.connect(interface='pcan', channel='PCAN_USBBUS1', bitrate=250000)
# network.connect(interface='ixxat', channel=0, bitrate=250000)
# network.connect(interface='vector', app_name='CANalyzer', channel=0, bitrate=250000)
# network.connect(interface='nican', channel='CAN0', bitrate=250000)
# Read a variable using SDO
device_name = node.sdo['Manufacturer device name'].raw
vendor_id = node.sdo[0x1018][1].raw
# Write a variable using SDO
node.sdo['Producer heartbeat time'].raw = 1000
# Read PDO configuration from node
node.tpdo.read()
node.rpdo.read()
# Re-map TPDO[1]
node.tpdo[1].clear()
node.tpdo[1].add_variable('Statusword')
node.tpdo[1].add_variable('Velocity actual value')
node.tpdo[1].add_variable('Some group', 'Some subindex')
node.tpdo[1].trans_type = 254
node.tpdo[1].event_timer = 10
node.tpdo[1].enabled = True
# Save new PDO configuration to node
node.tpdo[1].save()
# Transmit SYNC every 100 ms
network.sync.start(0.1)
# Change state to operational (NMT start)
node.nmt.state = 'OPERATIONAL'
# Read a value from TPDO[1]
node.tpdo[1].wait_for_reception()
speed = node.tpdo[1]['Velocity actual value'].phys
val = node.tpdo['Some group.Some subindex'].raw
# Disconnect from CAN bus
network.sync.stop()
network.disconnect()
If you need to see what's going on in better detail, you can increase the logging_ level:
.. code-block:: python
import logging
logging.basicConfig(level=logging.DEBUG)
.. _PyPI: https://pypi.org/project/canopen/ .. _CANopen: https://www.can-cia.org/canopen/ .. _python-can: https://python-can.readthedocs.org/en/stable/ .. _Sphinx: http://www.sphinx-doc.org/ .. _develop mode: https://packaging.python.org/distributing/#working-in-development-mode .. _logging: https://docs.python.org/3/library/logging.html .. _pytest: https://docs.pytest.org/
FAQs
CANopen stack implementation
We found that canopen demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 2 open source maintainers collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
Product
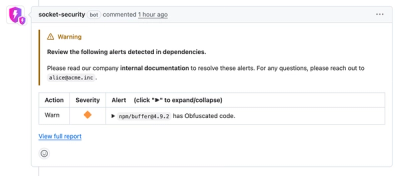
Socket now lets you customize pull request alert headers, helping security teams share clear guidance right in PRs to speed reviews and reduce back-and-forth.

Product
Socket's Rust support is moving to Beta: all users can scan Cargo projects and generate SBOMs, including Cargo.toml-only crates, with Rust-aware supply chain checks.