Security News
Crates.io Users Targeted by Phishing Emails
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
By Sarah Gooding - Sep 12, 2025
The DARLi is a Python 3 library that supports both numerical and symbolical computations of open loop articulated robots provided urdf file.
The DARLi (Differentiable Articulated Robotics Library) is a wrapper around the CasADi kinematics/dynamics and Pinocchio libraries. Its primary goal is to facilitate the creation of differentiable models for robotic systems, provided a URDF (Unified Robot Description Format) file. DARLi is not an implementation of mechanics-oriented algorithms, such as Featherstone's Articulated Body or the Recursive Newton-Euler. Instead, we rely on the efficient implementations provided by Pinocchio and offer a wrapper that grants easy access to a suite of features that we and our colleagues have found useful in practice of trajectory planning, feedback control, and system identification over poly-articulated robots.
Different Backends: Currently, DARLi supports the numerical Pinocchio backend and its CasADi wrapper, based on a modified version of casadi_kin_dyn (will be replaced with Pinocchio 3 upon its release). We are also planning to support JAX or PyTorch in the near future.
Fully Differentiable Model: DARLi provides a fully differentiable model from just the URDF file. The interface is user-friendly, offering access to different body parts, adding contacts friction cones, input mappings, etc. We also provide pre-built configurations for bipeds, manipulators, humanoids, quadrupeds, and more.
Continues and Discrete State Space: DARLi allows for manifold-aware integration, moving beyond simple Euler methods, and access to differentiable simulations (rollouts) for continuous and discrete state spaces. These features address practical control system concerns such as different control and integration rates. Together wit Auto-differentiation capabilities enable accurate high-order linearizations with respect to state and control inputs and even parameters.
Parametric Models: Most model components and their state spaces can be built dependent on a set of dynamic parameters, accompanied by their linear parametrization (i.e., regressors). In DARLi, combined with the State Space capabilities, this opens the door for non-trivial robustness and sensitivity analysis and greatly facilitates system identification.
Functional Wrapper: DARLi may provide access to various aspects of your model (mentioned above) as standalone CasADi functions. These functions can be called separately (or even code-generated) without the need to re-evaluate the entire model.
pip3 install darli
For now the library is actively changing, so if you are one of contributors or want to keep track of recent changes without reinstalling use the develope mode:
pip3 install -e .
darli dependency to your conda env look into exampleIt may be the case that running the examples fails on the step of solving casadi problem. In this case you have to extend LD_LIBRARY_PATH of your current environment.
For conda users you can patch your environment by running the following command:
wget -O - https://raw.githubusercontent.com/lvjonok/cmeel-conda-patch/master/patch.sh | bash -s <conda env name>
For pip users you have to manually extend LD_LIBRARY_PATH by running the following command:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$(python3 -m cmeel lib)
Note, that in both cases you have to restart your kernel/session/vscode or whatever you use to run python code.
git clone https://github.com/simeon-ned/darli
pip3 install -e .
pre-commit. This library will ensure that your code is formatted the same way among all other developers:pip3 install -e .[dev]
pre-commit install
The typical workflow as follows:
RobotModel instance~.update_model() methodThere are also banch of modules that facilitates work with given type of robots, i.e. manipulators, quadrupeds and bipeds.
The minimal example of using library:
from darli.backend import CasadiBackend
from darli.modeling import Robot
import numpy as np
import casadi as cs
from robot_descriptions import z1_description
# Initializing the RobotModel class
model = Robot(CasadiBackend(z1_description.URDF_PATH))
model.add_body({"end_effector": "link06"})
# Dynamics calculations
inertia = model.inertia
gravity_vector = model.gravity
coriolis = model.coriolis
# calling with CasAdi arguments
gravity_vector(cs.SX.sym("q", model.nq))
# calling with numpy arguments
gravity_vector(np.random.randn(model.nq))
nq = model.nq
# Body kinematics
model.body("end_effector").position
# Differential kinematics
model.body("end_effector").angular_velocity.local
# Adding contacts
model.body("end_effector").add_contact("wrench")
One may also use the prebuilded templates for some common robotics structures, i.e:
from darli.robots import biped
# Example for the bipedal robot
# foots are subject to wrench contact
from robot_descriptions import atlas_v4_description
biped_model = biped(
Functional,
CasadiBackend,
atlas_v4_description.URDF_PATH,
torso={"torso": "pelvis"},
foots={
"left_foot": "l_foot",
"right_foot": "r_foot",
},
)
biped_model.forward_dynamics
biped_model.body('torso').position
biped_model.body('torso').linear_velocity.world_aligned
biped_model.body('left_foot').contact
Please refer to dedicated example in ~/examples/01_models_and_robots to learn other capabilities of the library
FAQs
The DARLi is a Python 3 library that supports both numerical and symbolical computations of open loop articulated robots provided urdf file.
We found that darli demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
The Rust Security Response WG is warning of phishing emails from rustfoundation.dev targeting crates.io users.
Product
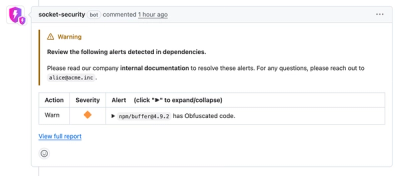
Socket now lets you customize pull request alert headers, helping security teams share clear guidance right in PRs to speed reviews and reduce back-and-forth.

Product
Socket's Rust support is moving to Beta: all users can scan Cargo projects and generate SBOMs, including Cargo.toml-only crates, with Rust-aware supply chain checks.