
Security News
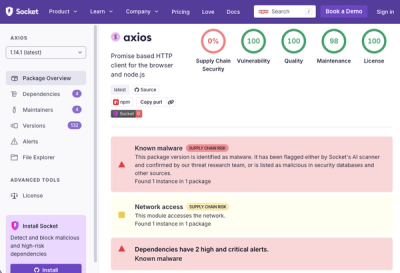
The Hidden Blast Radius of the Axios Compromise
The Axios compromise shows how time-dependent dependency resolution makes exposure harder to detect and contain.
By Ahmad Nassri - Apr 01, 2026
playground
Advanced tools



A comprehensive suite of GPU-accelerated environments for robot learning research and sim-to-real, built with MuJoCo MJX.
Features include:
dm_control.For more details, check out the project website.
[!NOTE] We now support training with both the MuJoCo MJX JAX implementation, as well as the MuJoCo Warp implementation at HEAD. See this discussion post for more details.
You can install MuJoCo Playground directly from PyPI:
pip install playground
[!IMPORTANT] We recommend users to install from source to get the latest features and bug fixes from MuJoCo.
[!IMPORTANT] Requires Python 3.10 or later.
git clone git@github.com:google-deepmind/mujoco_playground.git && cd mujoco_playgroundpipuv venv --python 3.12source .venv/bin/activateuv pip install -U "jax[cuda12]" --index-url https://pypi.org/simple
python -c "import jax; print(jax.default_backend())" should print gpu. unset LD_LIBRARY_PATH may need to be run before running this command.uv --no-config sync --all-extrasuv --no-config run python -c "import mujoco_playground; print('Success')"
uv --no-config run python -c "from mujoco_playground import locomotion; locomotion.load('G1JoystickFlatTerrain')"For basic usage, navigate to the repo's directory, install from source with jax[cuda12], and run:
train-jax-ppo --env_name CartpoleBalance
To train with MuJoCo Warp:
train-jax-ppo --env_name CartpoleBalance --impl warp
Or with uv:
uv --no-config run train-jax-ppo --env_name CartpoleBalance --impl warp
uv --no-config run train-rsl-ppo --env_name CartpoleBalance --impl warp
| Colab | Description |
|---|---|
| Introduction to the Playground with DM Control Suite | |
| Locomotion Environments | |
| Manipulation Environments | |
| Vision Environments |
To interactively view trajectories throughout training with rscope, install it (pip install rscope) and run:
python learning/train_jax_ppo.py --env_name PandaPickCube --rscope_envs 16 --run_evals=False --deterministic_rscope=True
# In a separate terminal
python -m rscope
Get started by installing the library and exploring its features! Found a bug? Report it in the issue tracker. Interested in contributing? If you are a developer with robotics experience, we would love your help—check out the contribution guidelines for more details.
Users with NVIDIA Ampere architecture GPUs (e.g., RTX 30 and 40 series) may experience reproducibility issues in mujoco_playground due to JAX’s default use of TF32 for matrix multiplications. This lower precision can adversely affect RL training stability. To ensure consistent behavior with systems using full float32 precision (as on Turing GPUs), please run export JAX_DEFAULT_MATMUL_PRECISION=highest in your terminal before starting your experiments (or add it to the end of ~/.bashrc).
To reproduce results using the same exact learning script as used in the paper, run the brax training script which is available here. There are slight differences in results when using the learning/train_jax_ppo.py script, see the issue here for more context.
If you use Playground in your scientific works, please cite it as follows:
@misc{mujoco_playground_2025,
title = {MuJoCo Playground: An open-source framework for GPU-accelerated robot learning and sim-to-real transfer.},
author = {Zakka, Kevin and Tabanpour, Baruch and Liao, Qiayuan and Haiderbhai, Mustafa and Holt, Samuel and Luo, Jing Yuan and Allshire, Arthur and Frey, Erik and Sreenath, Koushil and Kahrs, Lueder A. and Sferrazza, Carlo and Tassa, Yuval and Abbeel, Pieter},
year = {2025},
publisher = {GitHub},
url = {https://github.com/google-deepmind/mujoco_playground}
}
The texture used in the rough terrain for the locomotion environments is from Polyhaven and licensed under CC0.
All other content in this repository is licensed under the Apache License, Version 2.0. A copy of this license is provided in the top-level LICENSE file in this repository. You can also obtain it from https://www.apache.org/licenses/LICENSE-2.0.
This is not an officially supported Google product.
FAQs
Unknown package
We found that playground demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
The Axios compromise shows how time-dependent dependency resolution makes exposure harder to detect and contain.
Research
A supply chain attack on Axios introduced a malicious dependency, plain-crypto-js@4.2.1, published minutes earlier and absent from the project’s GitHub releases.

Research
Malicious versions of the Telnyx Python SDK on PyPI delivered credential-stealing malware via a multi-stage supply chain attack.