Product
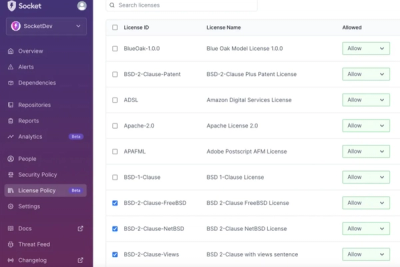
Introducing License Enforcement in Socket
Ensure open-source compliance with Socket’s License Enforcement Beta. Set up your License Policy and secure your software!
By Philipp Burckhardt - Oct 17, 2024
gazebo-yarp-synchronizer
Advanced tools





![]()
Synchronization with Gazebo Classic via YARP. With Python batteries.
This project is the client side of the Clock Plugin included in robotology/gazebo-yarp-plugins, with some sugar on top.
It provides GazeboYarpSynchronizer, a new class that extends the automatically generated resources from the thrift service and provides initialization and termination helpers.
The main scope of this repository is providing a PyPI package for Python usage, but nothing prevents importing and using it from plain C++.
gazebo-yarp-synchronizer expects to find installed and configured the following dependencies:
pip3 install gazebo-yarp-synchronizer
In different terminals, execute:
# 1. Start the YARP server
yarpserver
# 2. Open Gazebo paused
gazebo -u -slibgazebo_yarp_clock.so
# 3. Make sure that YARP is running
yarp detect
# 4. Open the Python interpreter
ipython
Then, in the Python interpreter:
# Import the module
>>> from gazebo_yarp_synchronizer import GazeboYarpSynchronizer
# Create the Gazebo synchronizer
>>> gys = GazeboYarpSynchronizer(gazebo_rpc_port_name="/clock/rpc")
# Initialize the Gazebo synchronizer
>>> gys.init()
# [INFO] |yarp.os.Port| Port /tmp/port/1 active at tcp://192.168.8.102:10056/
# [INFO] |yarp.os.impl.PortCoreOutputUnit| Sending output from /tmp/port/1 to /clock/rpc using tcp
# Inspect simulation status
>>> gys.get_step_size(), gys.get_simulation_time()
# (0.001, 0.0)
# Advance the simulation synchronously
>>> gys.step_simulation_and_wait(number_of_steps=250)
# Print time
>>> gys.get_simulation_time()
# 0.25
# Advance the simulation synchronously
>>> gys.run_simulation_and_wait(duration=0.75)
# Print time
>>> gys.get_simulation_time()
# 1.0
# Terminate the synchronizer
>>> gys.fini()
# [INFO] |yarp.os.impl.PortCoreOutputUnit| Removing output from /tmp/port/1 to /clock/rpc
Pull requests are welcome. For major changes, please open an issue first to discuss what you would like to change.
FAQs
Synchronization between Python and Gazebo Classic via YARP.
We found that gazebo-yarp-synchronizer demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Product
Ensure open-source compliance with Socket’s License Enforcement Beta. Set up your License Policy and secure your software!
Product
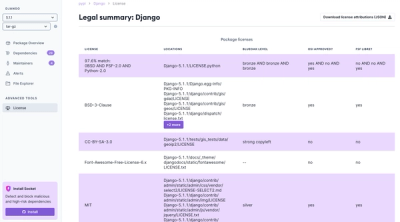
We're launching a new set of license analysis and compliance features for analyzing, managing, and complying with licenses across a range of supported languages and ecosystems.
Product
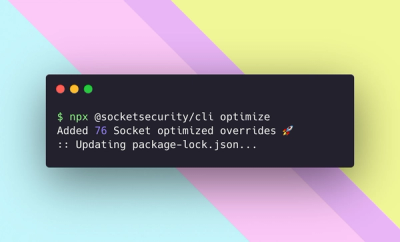
We're excited to introduce Socket Optimize, a powerful CLI command to secure open source dependencies with tested, optimized package overrides.