
Research
Security News
Malicious npm Package Targets Solana Developers and Hijacks Funds
A malicious npm package targets Solana developers, rerouting funds in 2% of transactions to a hardcoded address.
By Socket Research Team - Dec 02, 2024
CV Aid is a set of helpers of computer vision tasks.
pip install cv-aid
git clone https://github.com/khalidelboray/cv-aid
cd cv-aid
poetry install
poetry run python setup.py install
poetry run test
all tests are in tests/ directory.
Basic Frame Functions
from cv_aid import Frame
frame = Frame.load('/path/to/image.jpg')
# or
import cv2
frame = Frame(cv2.imread('/path/to/image.jpg'))
# Grayscale image
gray = frame.gray()
# Resize image
small = frame.resize(width=100, height=100)
# Crop image
cropped = frame.crop(x=100, y=100, width=100, height=100)
# All methods return a new Frame object, so you can chain them
new_frame = frame.resize(width=100, height=100).crop(x=100, y=100, width=100, height=100)
# Save image
frame.save('/path/to/image.jpg')
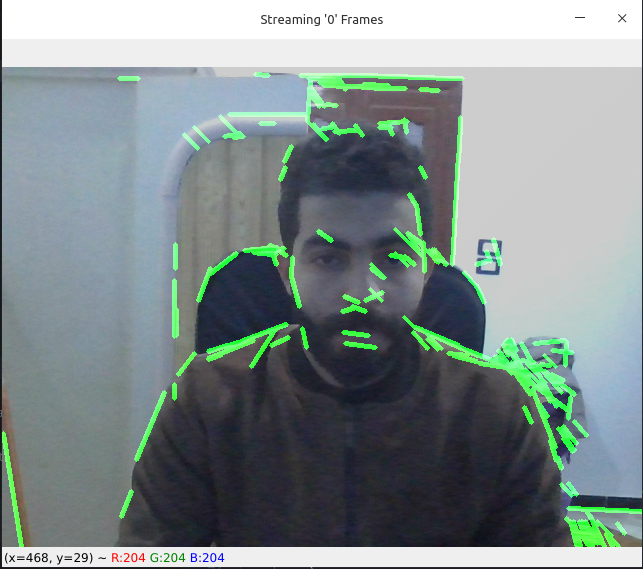
Basic Video Functions
from cv_aid import VideoStream, Frame
import cv2
import numpy as np
def on_frame(frame: Frame) -> Frame:
"""
A function that is called when a frame is read from the video stream.
:param frame: The frame that was read.
:return: The frame that was read.
"""
orig = frame
canny = frame.gray().canny(50, 100)
line_image = Frame(np.copy(orig.frame) * 0)
lines = cv2.HoughLinesP(
canny.frame, 1, np.pi / 180, 50, np.array([]), minLineLength=10, maxLineGap=5
)
if lines is not None:
for line in lines:
line = line[0]
line_image = line_image.line(
(line[0], line[1]), (line[2], line[3]), (0, 255, 0), 3
)
lines_edges = cv2.addWeighted(orig.frame, 0.8, line_image.frame, 1, 1)
return Frame(lines_edges)
stream = VideoStream(src=0, on_frame=on_frame).start()
stream.start_window()
Output Demo:
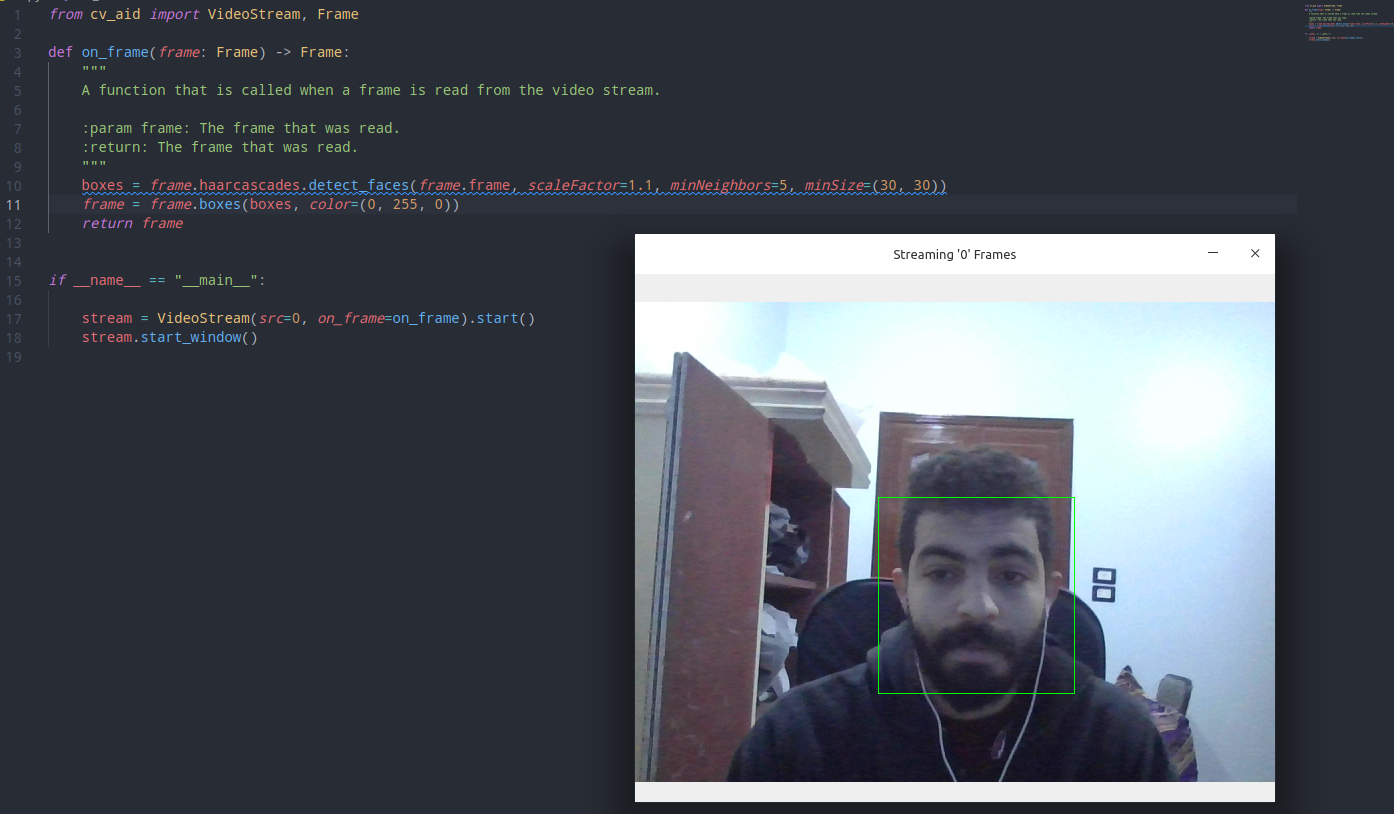
Haar Cascade Functions
from cv_aid import VideoStream, Frame
def on_frame(frame: Frame) -> Frame:
"""
A function that is called when a frame is read from the video stream.
:param frame: The frame that was read.
:return: The frame that was read.
"""
boxes = frame.haarcascades.detect_faces(frame.frame, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
frame = frame.boxes(boxes, color=(0, 255, 0))
return frame
if __name__ == "__main__":
stream = VideoStream(src=0, on_frame=on_frame).start()
stream.start_window()
Output Demo:
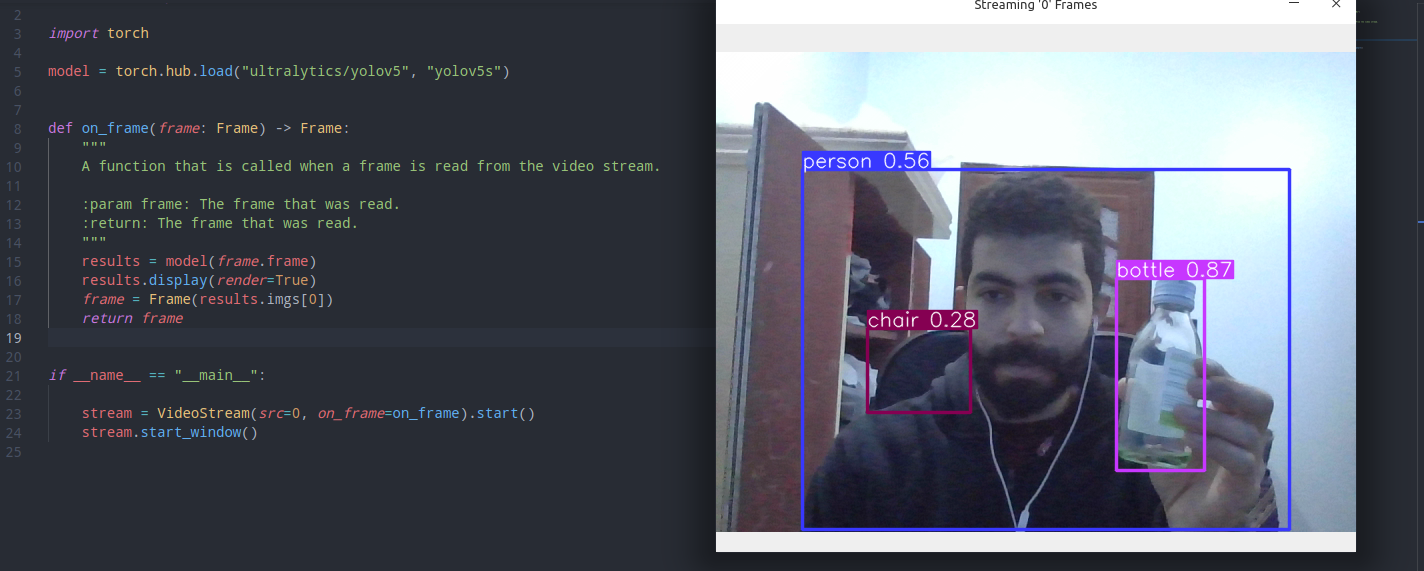
Tourch Hub (Yolov5)
from cv_aid import VideoStream, Frame
import torch
model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
def on_frame(frame: Frame) -> Frame:
"""
A function that is called when a frame is read from the video stream.
:param frame: The frame that was read.
:return: The frame that was read.
"""
results = model(frame.frame)
results.display(render=True)
frame = Frame(results.imgs[0])
return frame
if __name__ == "__main__":
stream = VideoStream(src=0, on_frame=on_frame).start()
stream.start_window()
Dlib (Download model)
from cv_aid._dlib import Dlib
saved_model = Dlib.download_landmark_detector(path='/dir/to/download/model/at/')
dlib = Dlib(landmark_predictor_path=saved_model)
face_recognetion_model = Dlib.download_face_recognition_model_v1(path='/dir/to/download/model/at/')
Dlib (Face landmark)
Give it a try!
# pylint: disable=C0103
import math
import cv2
import numpy as np
from skimage.draw import disk, polygon, set_color
from cv_aid import Frame, VideoStream
RIGHT_EYE_POINTS = list(range(36, 42))
LEFT_EYE_POINTS = list(range(42, 48))
def get_poly_data(desired, landmarks, shape):
points = []
for i in desired:
points.append((landmarks.part(i).x, landmarks.part(i).y))
points = np.array(points, dtype=np.int32)
rr, cc = polygon(points[:, 1], points[:, 0], shape)
return points, rr, cc
def on_frame(frame: Frame) -> Frame:
"""
A function that is called when a frame is read from the video stream.
:param frame: The frame that was read.
:return: The frame that was read.
"""
faces = frame.dlib.detect_faces(frame.frame)
for face in faces:
face_landmarks = frame.dlib.detect_landmarks(frame.frame, face)
left_eye, *_ = get_poly_data(LEFT_EYE_POINTS, face_landmarks, frame.shape)
right_eye, *_ = get_poly_data(RIGHT_EYE_POINTS, face_landmarks, frame.shape)
left_eye_center = left_eye.mean(axis=0).astype("int")
right_eye_center = right_eye.mean(axis=0).astype("int")
left_eye_radius = (
int(
math.sqrt(
(left_eye[3][0] - left_eye[0][0]) ** 2
+ (left_eye[3][1] - left_eye[0][1]) ** 2
)
)
- 10
)
right_eye_radius = (
int(
math.sqrt(
(right_eye[3][0] - right_eye[0][0]) ** 2
+ (right_eye[3][1] - right_eye[0][1]) ** 2
)
)
- 10
)
frame = (
# Glasses connection line
frame.line(
(left_eye_center[0] - left_eye_radius, left_eye_center[1]),
(right_eye_center[0] + right_eye_radius, right_eye_center[1]),
(0, 0, 0),
4,
)
# Glasses circle 1 *Border*
.circle(
left_eye_center,
left_eye_radius,
(0, 0, 0),
4,
)
# Glasses circle 1
.circle(
left_eye_center,
left_eye_radius,
(0, 0, 255),
2,
)
# Glasses circle 2 *Border*
.circle(
right_eye_center,
right_eye_radius,
(0, 0, 0),
4,
)
# Glasses circle 2
.circle(
right_eye_center,
right_eye_radius,
(0, 0, 255),
2,
)
# Ears connection line 1
.line(
(face_landmarks.part(0).x, face_landmarks.part(0).y),
(right_eye_center[0] - right_eye_radius, right_eye_center[1]),
(0, 0, 255),
2,
)
# Ears connection line 1
.line(
(face_landmarks.part(16).x, face_landmarks.part(16).y),
(left_eye_center[0] + left_eye_radius, left_eye_center[1]),
(0, 0, 255),
2,
)
)
# Overlay the frame with the image of the glasses colored in transparent black
overlay = frame.frame.copy()
alpha = 0.5
# Get first circle rows and columns (pixel coordinates)
rr, cc = disk(right_eye_center[::-1], right_eye_radius)
# Set the color of the circle
set_color(overlay, (rr, cc), (0, 0, 0))
# Get second circle rows and columns (pixel coordinates)
rr, cc = disk(left_eye_center[::-1], left_eye_radius)
# Set the color of the circle
set_color(overlay, (rr, cc), (0, 0, 0))
# Overlay the image with the overlay image
frame.frame = cv2.addWeighted(overlay, alpha, frame.frame, 1 - alpha, 0)
return frame
if __name__ == "__main__":
stream = VideoStream(src=0, on_frame=on_frame).start()
stream.start_window()
FAQs
CV Aid is a set of helpers for computer vision tasks.
We found that cv-aid demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Research
Security News
A malicious npm package targets Solana developers, rerouting funds in 2% of transactions to a hardcoded address.

Security News
Research
Socket researchers have discovered malicious npm packages targeting crypto developers, stealing credentials and wallet data using spyware delivered through typosquats of popular cryptographic libraries.
Security News
Socket's package search now displays weekly downloads for npm packages, helping developers quickly assess popularity and make more informed decisions.