Future Vision : A New Era in Robotics Education
Future Vision : A New Era in Robotics Education
What is it? 
It allows you to control the leds, RGB led, buttons and 8x8 led matrix on your Arduino board with Python language.
You can control Arduino with computer vision using your host computer and facilitate computer vision on a Raspberry Pi board.
A Darwin Future Vision mobile app created for the library allows you to control your iPhone phone's observational hardware: its flash, screen brightness and speaker volume ratio.
It pulls iPhone hardware information about the phone's screen brightness, speaker volume ratio, and which volume button is pressed, allowing you to retrieve and use this data in your python code
You can control 5 led graphs in the LEDs section of the iPhone app.
With the iPhone app, you can send data to your python code or see the data you send from your python code in the app.
What is the Goal 
It aims to reawaken children's curiosity in robotics education and break new ground in robotics education by going beyond the classical robotics education.
Modular and Features
With the Arduino module of the Future Vision library, you can control the LEDs, RGB LEDs and 8x8 LED matrix on Arduino using Python language, and also read values from the buttons connected to the analog pins of Arduino.
With the Raspberry Pi module of the Future Vision library, you can read and control the LEDs, RGB LEDs, 8x8 LED matrix on the Sense HAT and Sense HAT sensors on the Raspberry Pi, you can also read the Sense HAT joystick values.
With the Vision module of the Future Vision library, you can create your own sign language, detect hands, detect happiness and unhappiness on your face, detect the instantaneous number of faces in a room, detect colors, detect whether eyes are closed or open, manage keys on the keyboard, measure volume, make your computer talk, analyze left and right arm movements, recognize objects and perform personal face recognition.
With the iPhone module of the Future Vision library and the mobile app, you can control your iPhone's observational hardware: flash, screen brightness and speaker volume. You can also see the screen brightness, speaker volume ratio and volume up or down button presses data on your computer and control your Arduino or Raspberry Pi board based on this data, or you can control your phone's flash with Arduino and Raspberry Pi, for example, by pressing the button.
Using Modules 
Arduino
In order for the Future Vision library to work correctly with your Arduino Uno board, you need to install the FutureVision-Arduino.ino code on your Arduino Uno board.
Pins 13, 12 and 11 are dedicated to LED matrix, pins 10, 9, 8 are dedicated to RGB LED. You can only use pins 7, 6, 5, 4, 3, 2 as digital outputs.
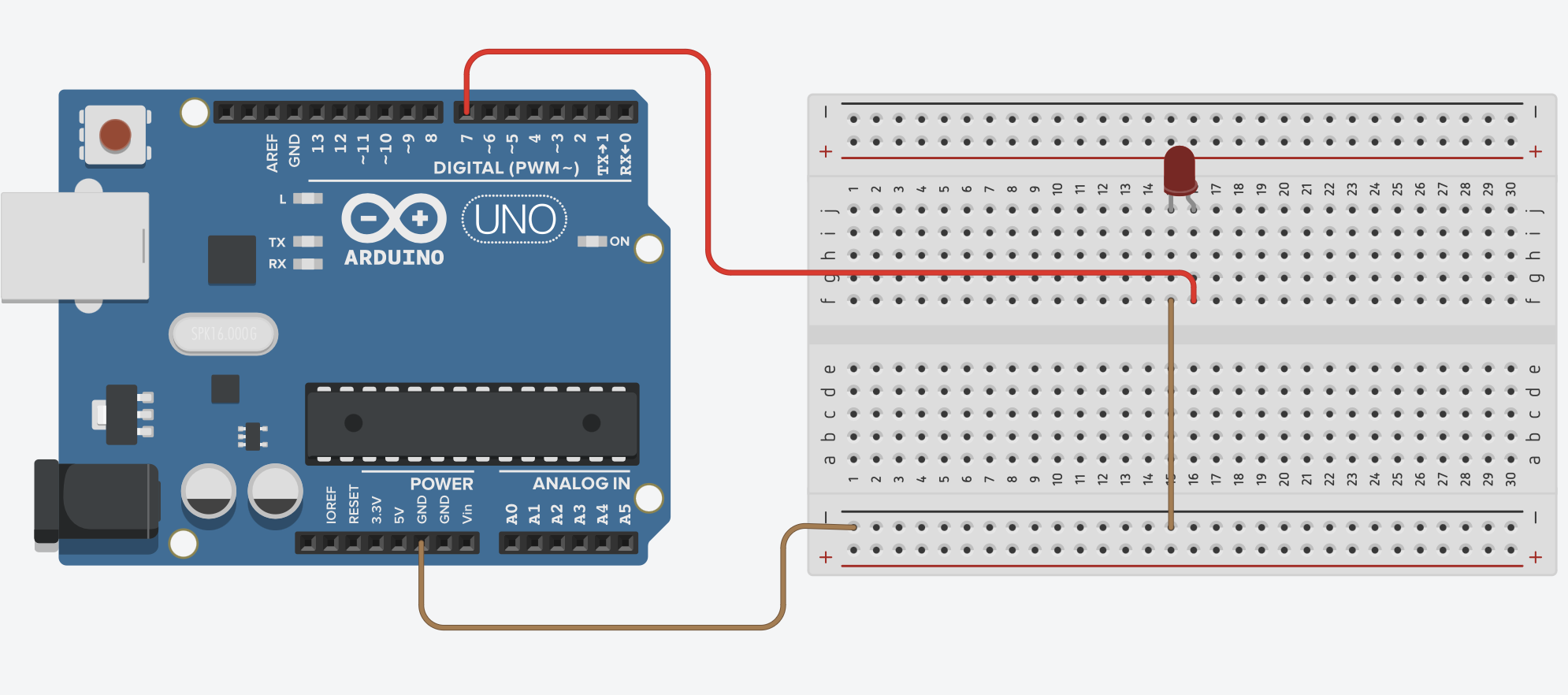
Led on and off
from futurevision import arduino
uno=arduino.Arduino(usb_port="/dev/cu.usbmodem101",baud=9600)
uno.on(pin=7)
uno.wait(1)
uno.off(pin=7)
LED connections are as follows.
RGB Led Controlled
Colors you can display on RGB LED:
- Red 🔴
- Yellow 🟡
- Green 🟢
- Blue 🔵
- Purple 🟣
- White ⚪️
- Light Blue 🩵
You can turn off your RGB led by entering one of these parameters: clear & off
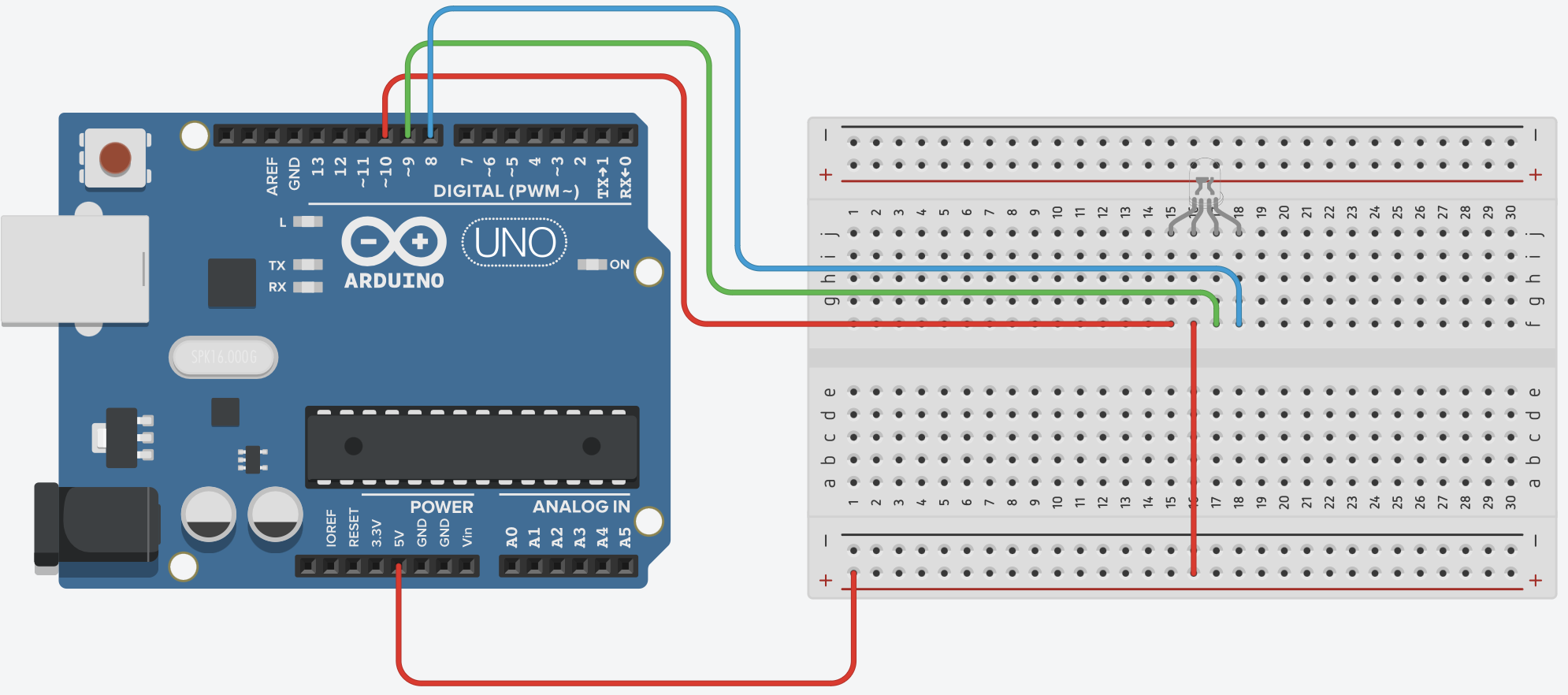
Pin layout of the RGB LED: R:10 G:9 B:8
from futurevision import arduino
uno=arduino.Arduino(usb_port="/dev/cu.usbmodem101",baud=9600)
uno.rgb_led("red")
uno.wait(1)
uno.rgb_led("yellow")
uno.wait(1)
uno.rgb_led("green")
uno.wait(1)
uno.rgb_led("blue")
uno.wait(1)
uno.rgb_led("purple")
uno.wait(1)
uno.rgb_led("white")
uno.wait(1)
uno.rgb_led("clear")
uno.wait(1)
RGB LED connections are as follows.
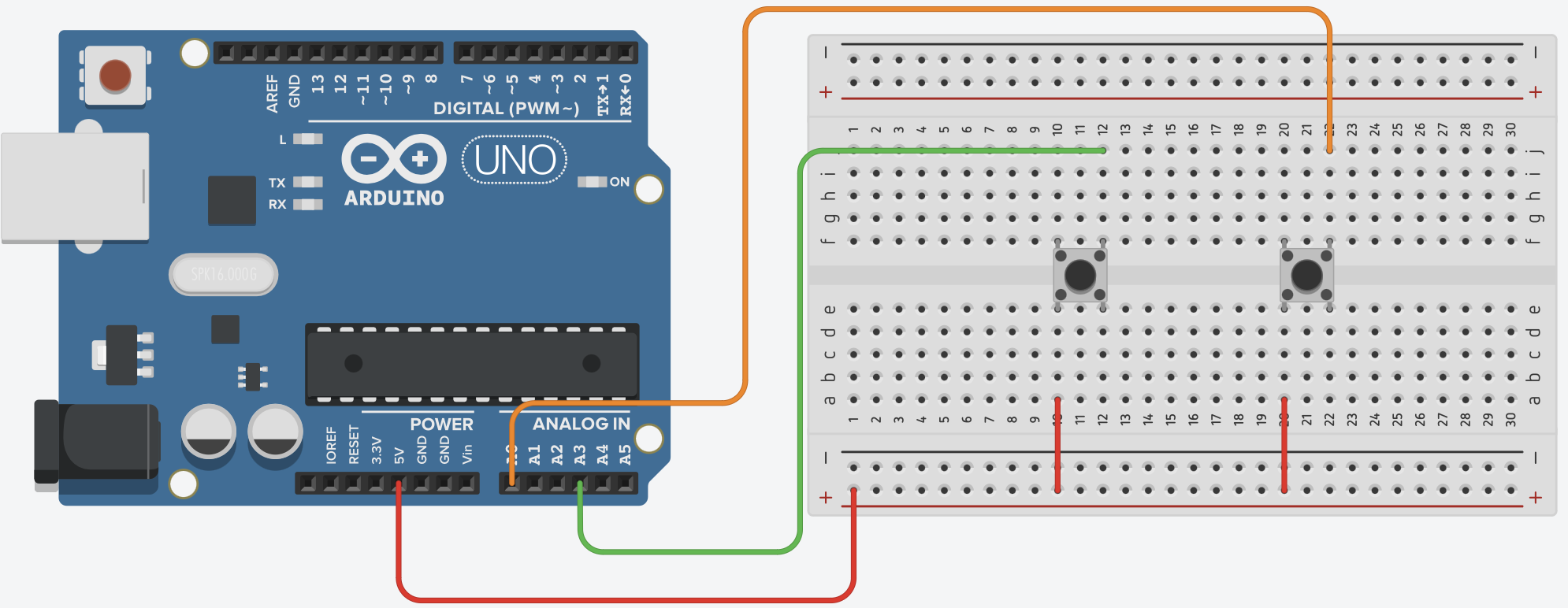
Reading Button Value
The values of the buttons are set to be read only from analog pins. The returned button value will be given as {PIN}. For example, let's say we have two buttons connected to pins A0 and A3. When we press the A3 pin three times and press the button on the A0 pin twice, the terminal output will be as follows.
from futurevision import arduino
uno=arduino.Arduino(usb_port="/dev/cu.usbmodem101",baud=9600)
while True:
read=uno.read()
print(read)
Terminal Output
(base) ali@aliedis-MacBook-Air Desktop % python3 test.py
3
3
3
0
0
The button connections are as follows.
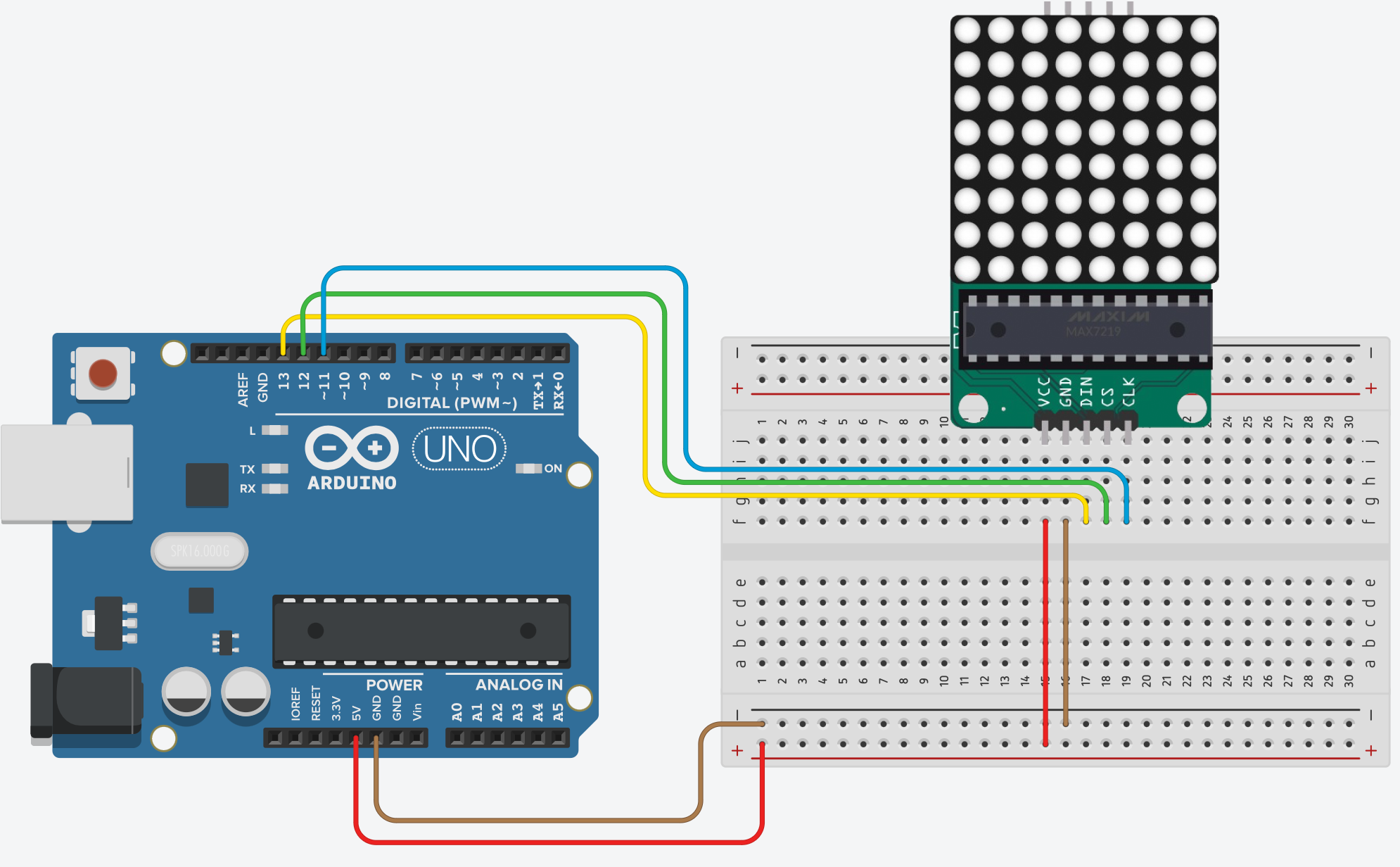
Led Matrix Controlled
Pin Layout of Led Matrix: DIN:13, CS:12, CLK:11
You can show any characters you want in Led Matrix. The character and shape list is as follows:
A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, Q, R, S, T, U, V, W, X, Y, Z
a, b, c, d, e, f, g, h, i, j, k, l, m, n, o, p, q, r, s, t, u, v, w, x, y, z
1, 2, 3, 4, 5, 6, 7, 8, 9, 0
+, -, *, /, %, %, =, up, down, right, left, happy, unhappy, heart
You can turn off your led matrix by entering one of these commands: clear & off
Led Matrix is set to run vertically by default. To change this, you can change the direction parameter to 0.
Example: uno.show_led_matrix("A",0)
from futurevision import arduino
uno=arduino.Arduino(usb_port="/dev/cu.usbmodem101",baud=9600)
upper_letter_list=['A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K', 'L', 'M', 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z']
lower_letter_list=['a', 'b', 'c', 'd', 'e', 'f', 'g', 'h', 'i', 'j', 'k', 'l', 'm', 'n', 'o', 'p', 'q', 'r', 's', 't', 'u', 'v', 'w', 'x', 'y', 'z']
number_list=[1, 2, 3, 4, 5, 6, 7, 8, 9, 0]
sign_list=['+', '-', '*', '/', '%', '=', 'up', 'down', 'right', 'left', 'happy', 'unhappy', 'heart']
for i in upper_letter_list:
uno.show_led_matrix(i)
uno.wait(1)
uno.show_led_matrix("clear")
for i in lower_letter_list:
uno.show_led_matrix(i)
uno.wait(1)
uno.show_led_matrix("clear")
for i in number_list:
uno.show_led_matrix(i)
uno.wait(1)
uno.show_led_matrix("clear")
for i in sign_list:
uno.show_led_matrix(i)
uno.wait(1)
uno.show_led_matrix("clear")
Led Matrix connections are as follows.
Raspberry Pi
Led on and off
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi()
rpi.on(14)
rpi.wait(1)
rpi.off(14)
RGB Led Controlled
Colors you can display on RGB LED:
- Red 🔴
- Yellow 🟡
- Green 🟢
- Blue 🔵
- Purple 🟣
- White ⚪️
- Light Blue 🩵
You can turn off your RGB led by entering one of these parameters: clear & off
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi()
rpi.rgb_led("red",14,15,18)
rpi.wait(1)
rpi.rgb_led("yellow",14,15,18)
rpi.wait(1)
rpi.rgb_led("green",14,15,18)
rpi.wait(1)
rpi.rgb_led("blue",14,15,18)
rpi.wait(1)
rpi.rgb_led("purple",14,15,18)
rpi.wait(1)
rpi.rgb_led("white",14,15,18)
rpi.wait(1)
rpi.rgb_led("lightblue",14,15,18)
rpi.wait(1)
rpi.rgb_led("clear",14,15,18)
rpi.wait(1)
Reading Button Value
The button is set to PULL UP.
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi()
while True:
button=rpi.read_button(14)
if(button):
print("Button Pressed")
rpi.wait(0.1)
Terminal Output
>>> %Run test.py
Button Pressed
Displaying Letters or Numbers in Sense HAT LED Matrix
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
rpi.show_letter("A")
rpi.wait(1)
rpi.show_letter("1")
rpi.wait(1)
rpi.clear()
Change Font Color and Background Color
List of colors you can select in the Sense HAT LED matrix:
None
White
Red
Green
Blue
Yellow
Purple
Orange
Pink
Cyan
Brown
Lime
Teal
Maroon
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
rpi.show_letter("A",text_colour="red",back_colour="white")
rpi.wait(1)
rpi.clear()
Displaying Message in Sense HAT LED Matrix
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
rpi.show_message("Future Vision")
Changing Sense Line Message Display Speed
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
rpi.show_message("Future Vision",scroll_speed=0.2)
Sense Hat Led Matrix Painting
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
rpi.fill("red")
rpi.wait(1)
rpi.clear()
Sense Hat Led Matrix Sign Display
Signs you can show up, down, right, left, happy, unhappy, heart
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
sign_list=['up', 'down', 'right', 'left', 'happy', 'unhappy', 'heart']
for i in sign_list:
rpi.show_sign(i)
rpi.wait(1)
rpi.clear()
Using Sense Hat Sensors
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
temperature=rpi.get_temperature()
humidity=rpi.get_humidity()
pressure=rpi.get_pressure()
gyroscope=rpi.get_gyroscope()
accelerometer=rpi.get_accelerometer()
compass=rpi.get_compass()
print(temperature)
print(humidity)
print(pressure)
print(gyroscope)
print(accelerometer)
print(compass)
Terminal Output
>>> %Run test.py
34.51753616333008
38.123626708984375
0
[-0.535936176776886, 0.06923675537109375, -0.25748658180236816]
[0.11419202387332916, 0.3673451840877533, 0.8629305362701416]
174.1544422493143
Sense Hat Joystick Button Click Detection
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
while True:
btn=rpi.joystick_button()
print(btn)
rpi.wait(0.1)
Terminal Output
>>> %Run test.py
False
False
True
False
Sense Hat Joystick Movements
from futurevision import raspberrypi
rpi=raspberrypi.RaspberryPi(sense_hat=True)
while True:
btn=rpi.joystick()
print(btn)
rpi.wait(0.1)
Terminal Output
>>> %Run test.py
up
down
right
left
middle
Vision
Hand Detection
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, fingers, status=vision.detect_hand(img)
print("Finger List: ",fingers,"Hand Status: ",status)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
fingers returns a list with 0 for closed fingers and 1 for open fingers.
The status variable returns True if all fingers are open, False if all fingers are closed.
Terminal Output
>>> %Run test.py
Finger List: [1, 1, 1, 1, 1] Hand Status: True
Finger List: [0, 0, 0, 0, 0] Hand Status: False
Change the Color of a Hand Drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, fingers, status=vision.detect_hand(img,line_color="red",circle_color="green")
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Disable Hand Drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, fingers, status=vision.detect_hand(img,draw=False)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Creating sign language
The fingers represented by the indexes in the list are as in the picture below.
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,fingers,status=vision.detect_hand(img)
if len(fingers) > 0:
if(fingers==[0,0,0,0,0]):
print("off")
if(fingers==[0,0,0,0,1]):
print("right")
if(fingers==[1,1,0,0,0]):
print("left")
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Emotion Detection
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, emotion,th=vision.detect_emotion(img)
print(emotion,th)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
emotion variable returns unhappy or happy depending on the happiness state.
th variable returns the happiness rate.
Terminal Output
unhappy 0.025
happy 0.045
unhappy 0.025
happy 0.045
Happiness detection threshold is set at 0.035 You can change your happiness detection threshold according to your preferences and needs
Changing the Happiness Threshold
img, emotion,th=vision.detect_emotion(img,threshold=0.040)
Drawing a Face and Changing the Color of the Text
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, emotion,th=vision.detect_emotion(img,line_color="green",text_color="green")
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Disable Face Drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, emotion=vision.detect_emotion(img,draw=False,text=False)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Instant Face Counter
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, count=vision.count_faces(img)
print(count)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
The count variable returns how many faces there are.
Terminal OutputInstant Face Counter
2
2
2
2
Disabling Instant Face Counter Drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img, count=vision.count_faces(img,draw=False)
print(count)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Color Recognition
Colors it can recognize Red, Green, Blue
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,name,list=vision.detect_colors(img)
print(name,list)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
name variable returns the name of the detected color.
The list variable returns the RGB ratios of the detected color in the order R G B.
blue [844.5, 415.5, 173812.0]
red [600.5, 311.0, 530.5]
green [0, 772.0, 0]
The Threshold value is set to 1000 by default. You can lower or raise this value according to your needs.
img,name,list=vision.detect_colors(img,threshold=500)
Change Drawing Color
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,name,list=vision.detect_colors(img,rectangle_color="yellow")
print(name,list)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Disable drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,name,list=vision.detect_colors(img,draw=False)
print(name,list)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Blink detection
For face recognition to work you need to download the face recognition model.shape_predictor_68_face_landmarks.dat
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
vision.blink_setup(path="shape_predictor_68_face_landmarks.dat")
while True:
_,img=cap.read()
img,EAR,status,time=vision.detect_blink(img)
print(EAR,status,time)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
EAR variable returns the eye closure rate.
status returns the eye's closed and open status.
time returns how many seconds the eye was closed.
0.2 False None
0.21 False None
0.22 False None
0.1 True None
0.1 True None
0.17 False 1.50
0.23 False None
0.23 False None
0.21 False None
The Threshold value is set to 0.15 by default. You can lower or raise this value according to your needs.
img,EAR,status,time=vision.detect_blink(img,threshold=0.20)
Disable eye drawing
from futurevision import vision
import cv2
vision=vision.Vision()
vision.blink_setup(path="shape_predictor_68_face_landmarks.dat")
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,EAR,status,time=vision.detect_blink(img)
print(EAR,status,time)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Body Detection and Analysis
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,left,right=vision.detect_body(img)
print(left,right)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
left variable returns the proximity of your left arm to your shoulder.
right variable returns the proximity of your left arm to your shoulder.
175.43727322952194 186.38214534742016
159.12635745126173 181.2641703620141
0.8016276382526805 67.3130811726478
7.112369711132518 3.427382752073662
3.0965441578399973 3.4120390844959267
0.008587732984777094 1.7826284349542627
1.46573896432903 1.4118781257852226
5.318943889580121 1.1099510521746376
4.449516553979241 2.073257712440663
7.570394013983709 3.0725981509538887
16.59312469528359 22.83114476402925
20.703749065899352 95.33857084841868
168.733170676982 177.10299133508224
175.13547154106007 178.61997780496543
Disable Body Drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,left,right=vision.detect_body(img,draw=False)
print(left,right)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Object Recognition
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
while True:
_,img=cap.read()
img,name=vision.detect_objects(img)
print(name)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
The name variable returns the name of the detected object.
person
person
person
person
person
person
Face Recognition
For face recognition to work you need to download the face recognition model.shape_predictor_68_face_landmarks.dat
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
vision.face_recognizer_setup(["Ali_Edis.png","Carl_Sagan.png"],path="shape_predictor_68_face_landmarks.dat")
while True:
_,img=cap.read()
img,name=vision.face_recognizer(img)
print(name)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
['unknown', 'Ali Edis']
['unknown', 'Ali Edis']
['unknown', 'Ali Edis']
Disable drawing
from futurevision import vision
import cv2
vision=vision.Vision()
cap=cv2.VideoCapture(0)
vision.face_recognizer_setup(["Ali_Edis.png","Carl_Sagan.png"],path="shape_predictor_68_face_landmarks.dat")
while True:
_,img=cap.read()
img,name=vision.face_recognizer(img,draw=False)
print(name)
cv2.imshow("Future Vision",img)
cv2.waitKey(1)
Keyboard Controlled
from futurevision import vision
vision=vision.Vision()
vision.press("a")
Typing Text with Keyboard
from futurevision import vision
vision=vision.Vision()
vision.write("future vision")
Making Your Computer Talk
from futurevision import vision
vision=vision.Vision()
vision.speak("Future Vision")
Language Switching
from futurevision import vision
vision=vision.Vision()
vision.speak("Merhaba",lang="fr")
File name change
from futurevision import vision
vision=vision.Vision()
vision.speak("Future Vision",filename="test.mp3")
How to Measure Sound Intensity with Your Computer Microphone
To run this code, you need to run this command in the terminal.
pip3 install pyaudio
from futurevision import vision
vision=vision.Vision ()
try:
vision.start_stream()
while True:
sound= vision.detect_sound()
print(sound)
except KeyboardInterrupt:
vision.stop_stream ()
iPhone
You can download the app by pressing the App Store logo.

Application Sections and Sample Codes
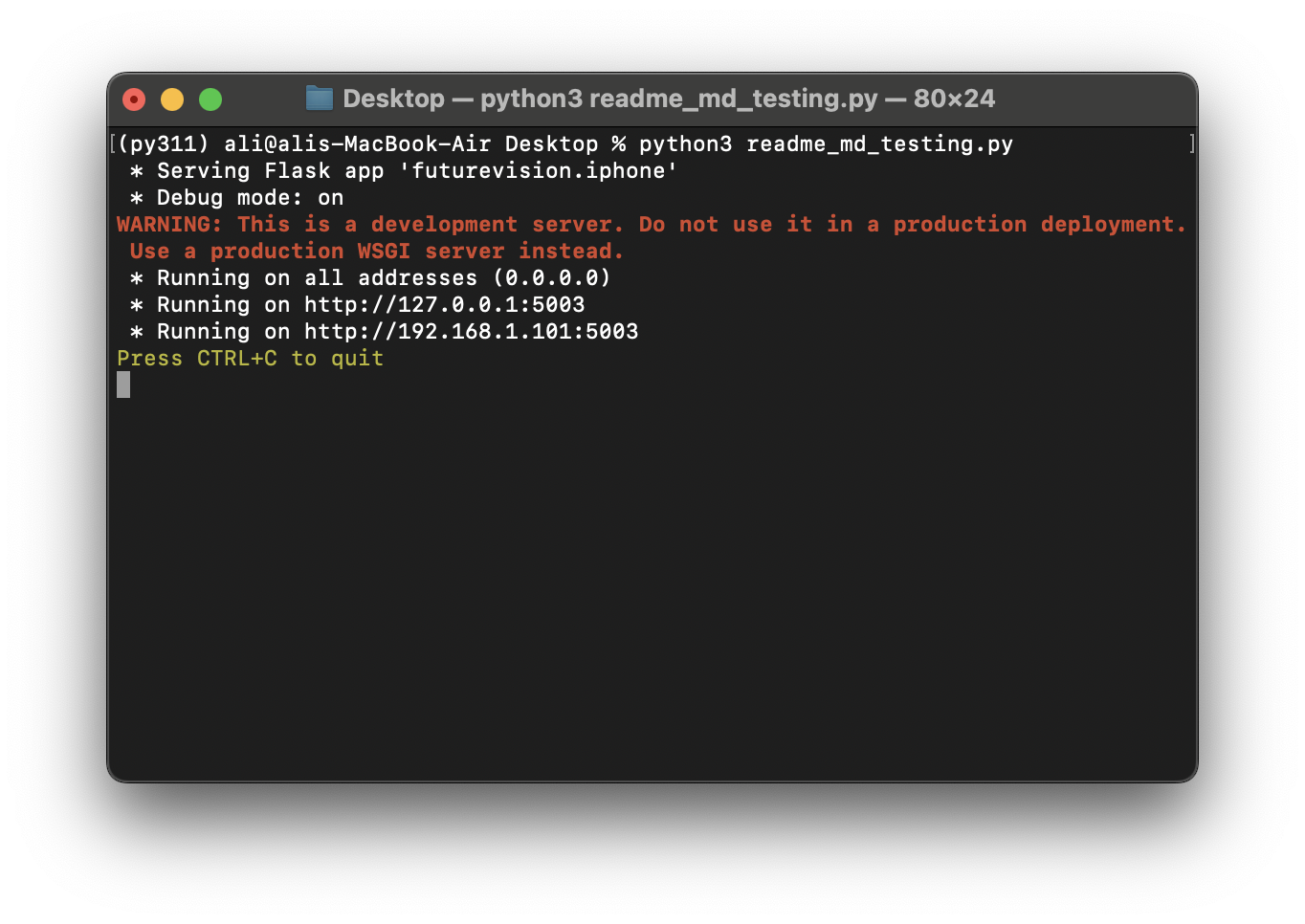
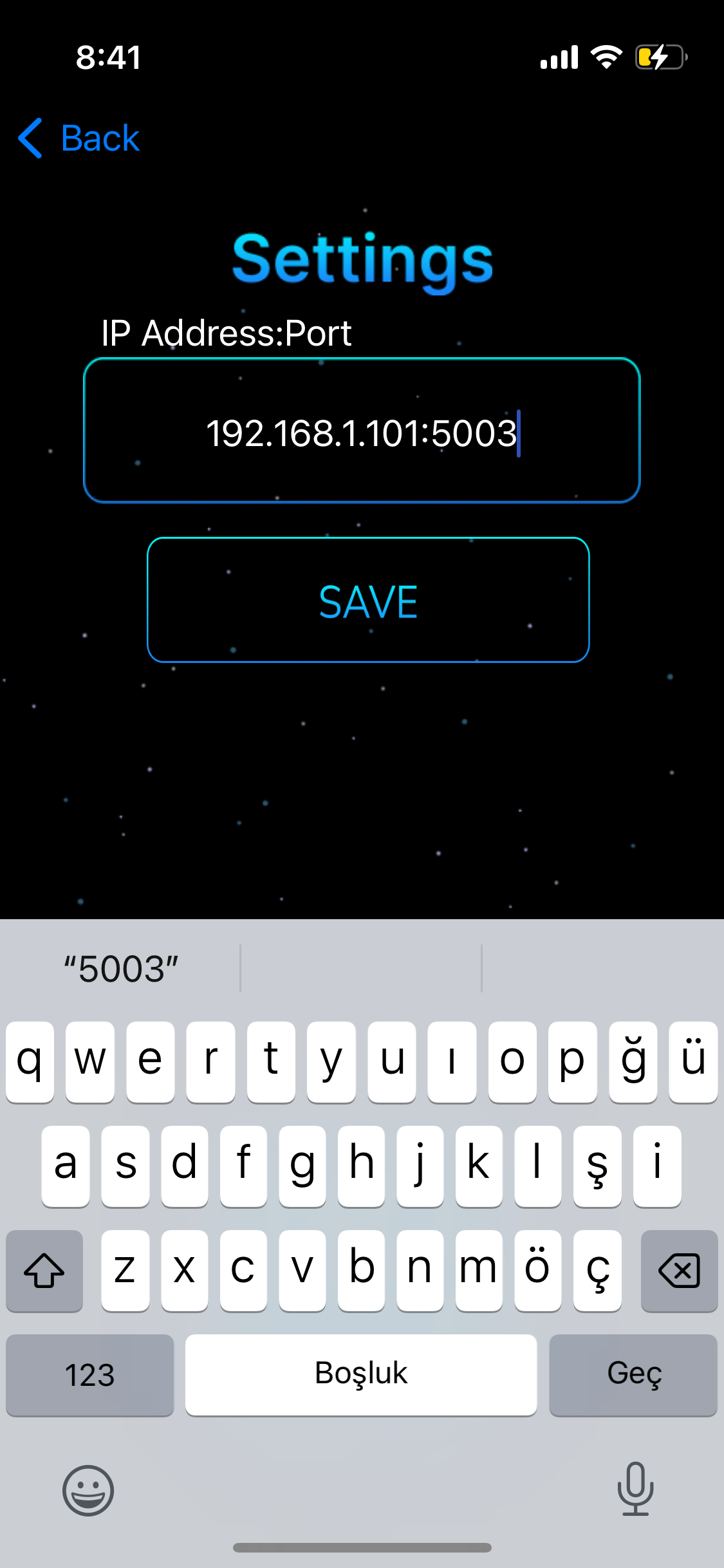
Settings
In the Settings section, you should save the IP address and port information that your Python code will give you so that the application can communicate with the Python code you will write.
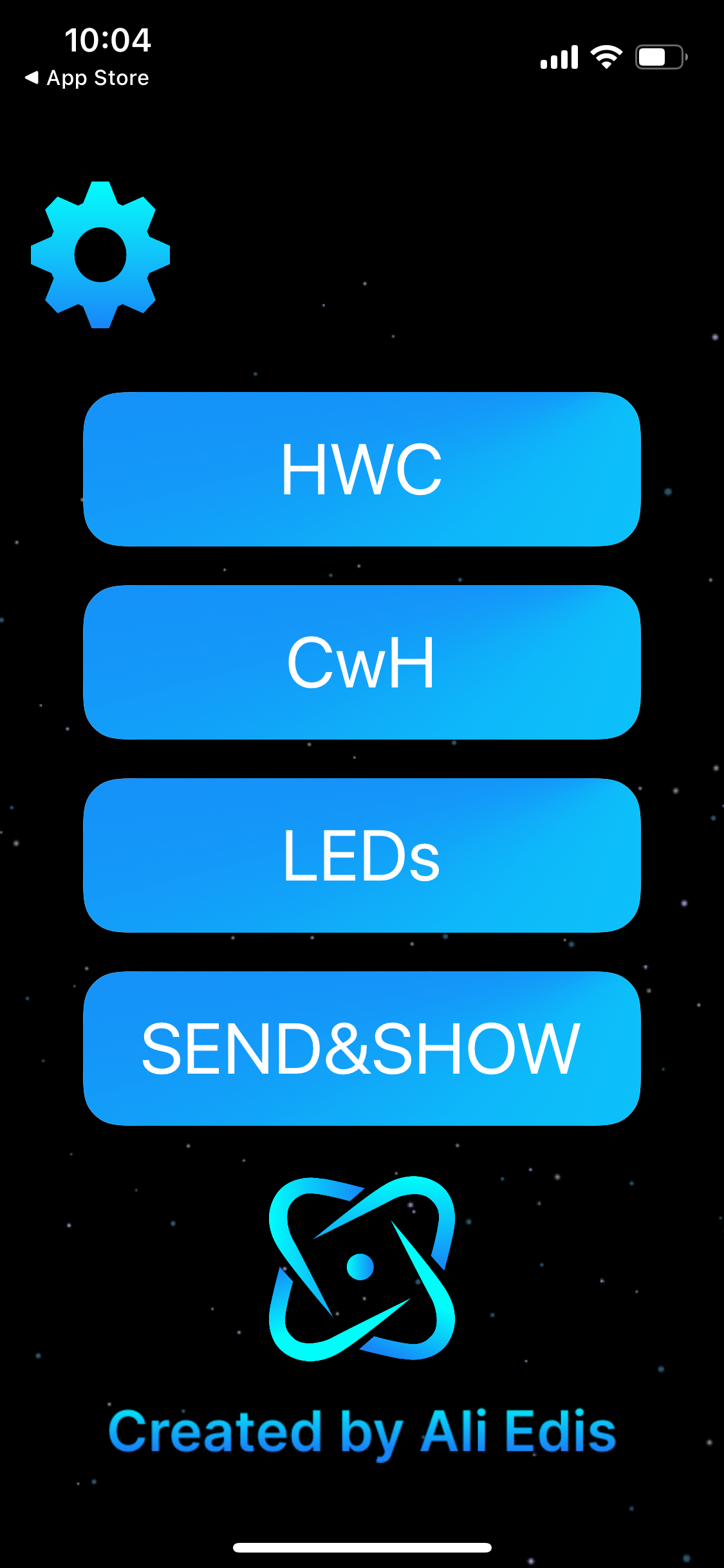
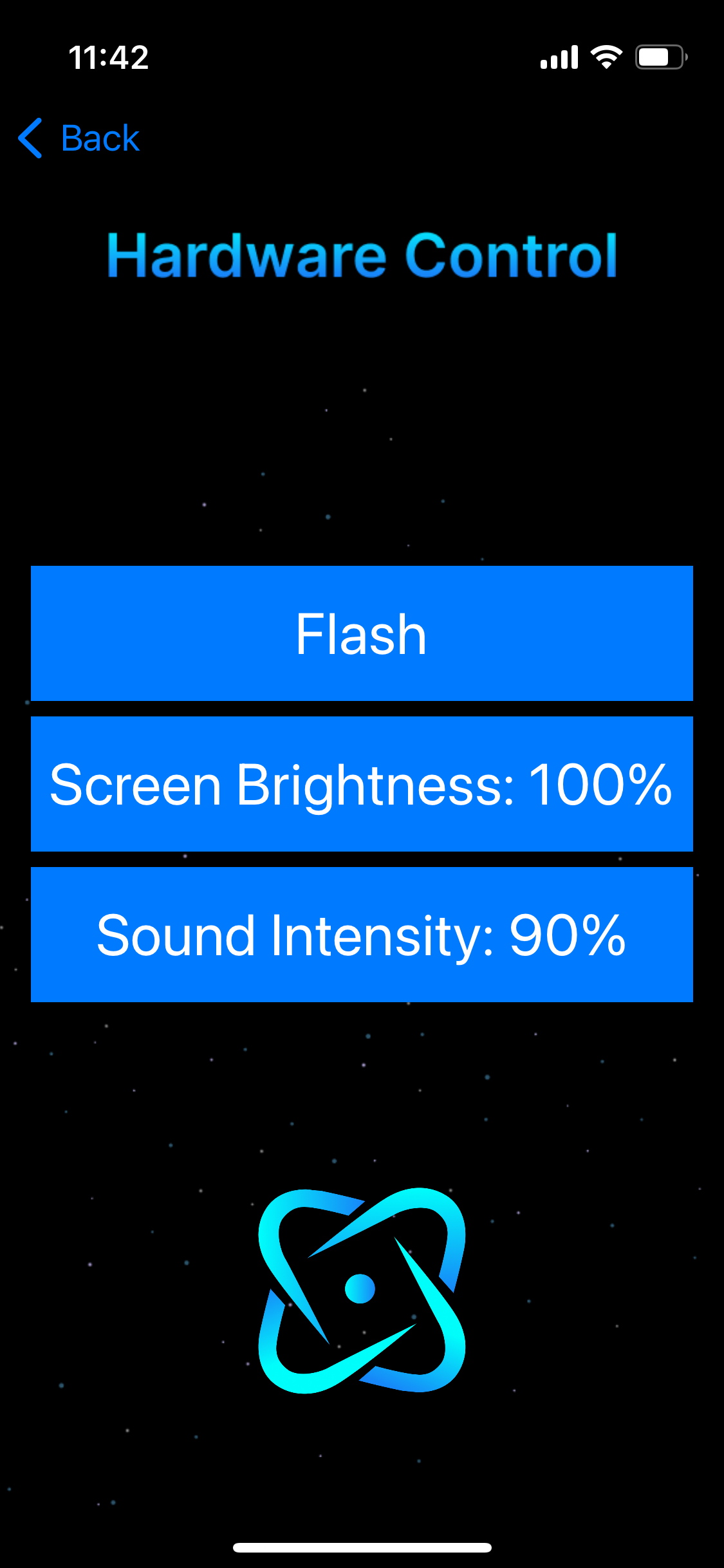
HWC
In this section, the iPhone module of the Future Vision library allows you to control the observational hardware of your iPhone based on the code you write. It allows you to control the Flash with flash_on() and flash_off() functions, the Screen Brightness with screen_brightness(value) function, and the Speaker Volume with volume_intensity(value) function.
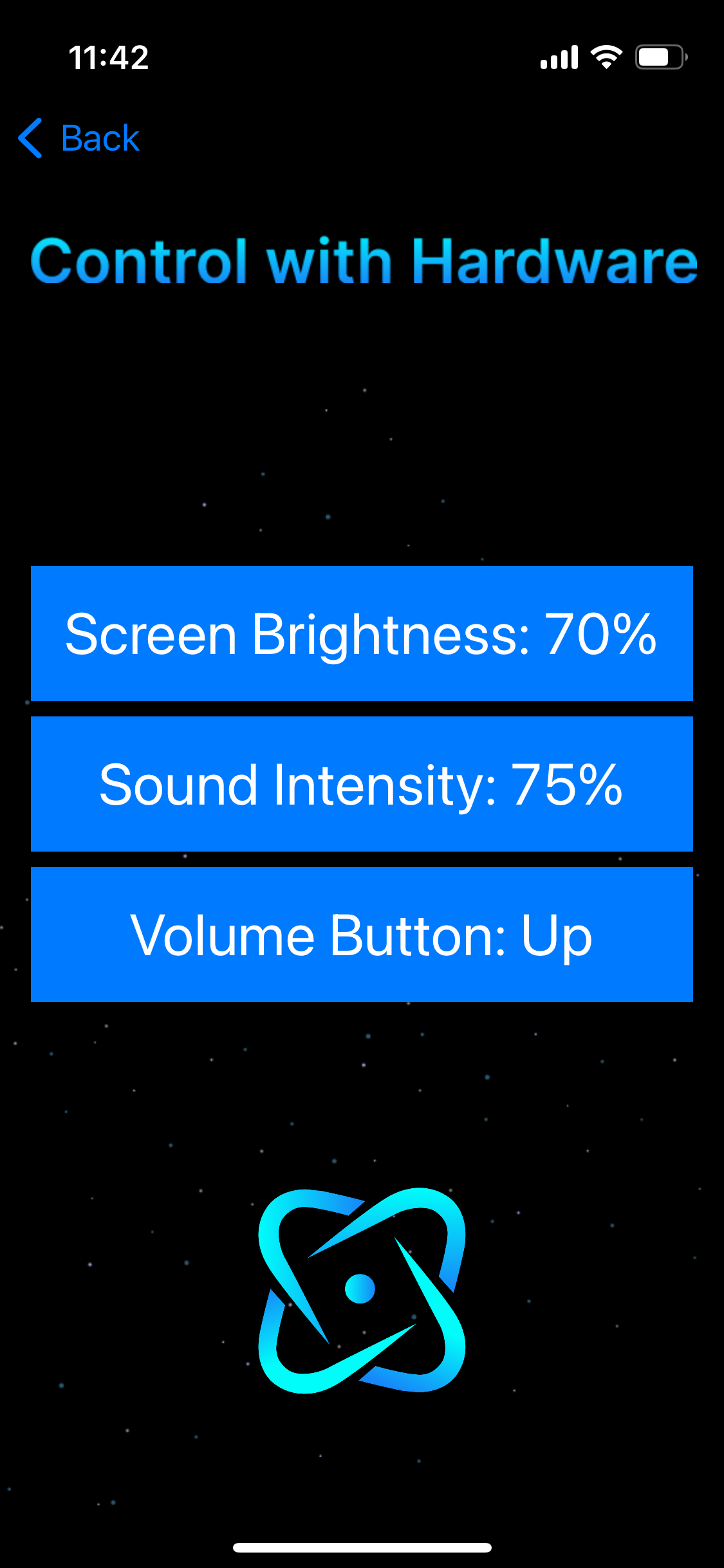
CwH
In this section, the iPhone module of the Future Vision library sends the observational hardware information of your iPhone to your python code as a list. You can read this list data with the read_data() function. The sample data list includes the screen brightness value, the volume value and the volume key pressed on your phone:
['25', '70', 'Down']
['25', '75', 'Up']
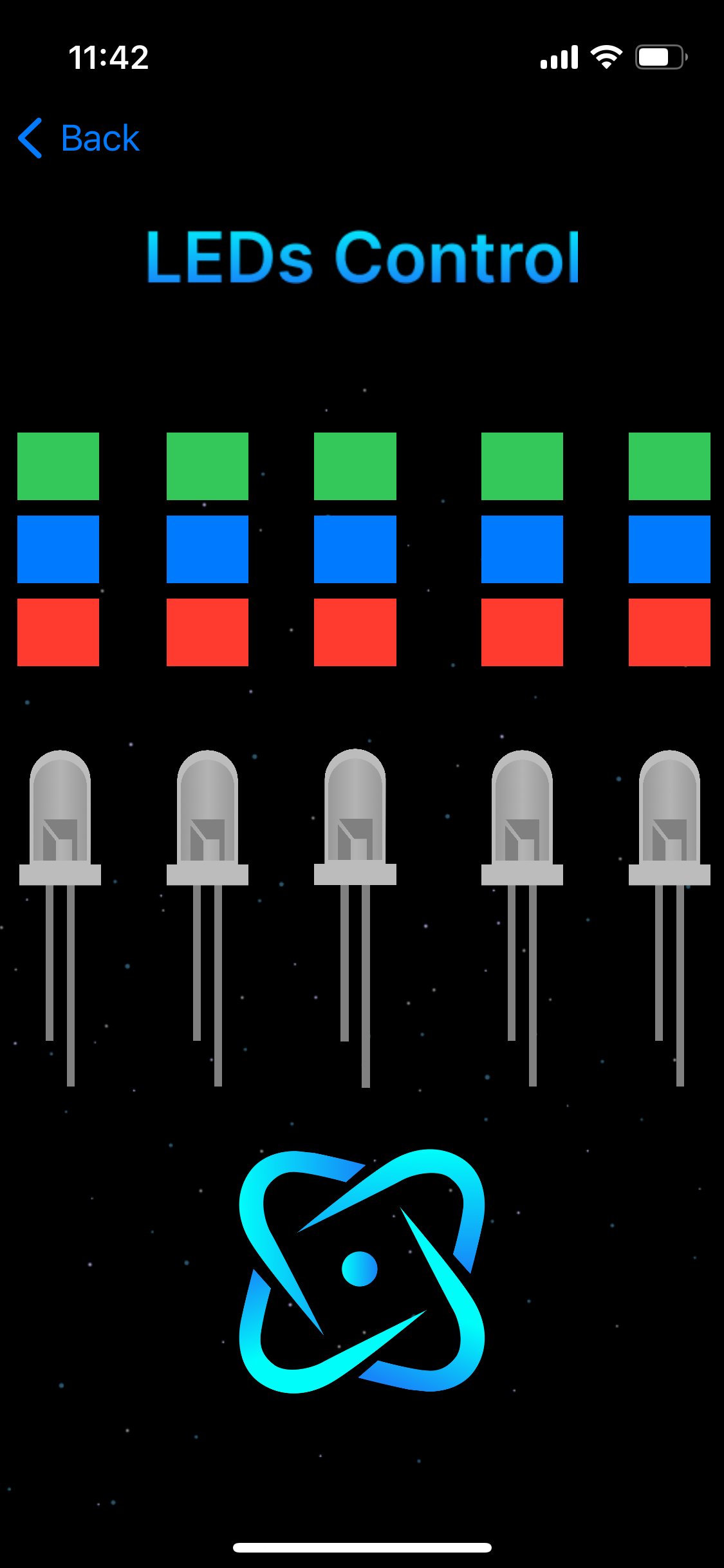
LEDs
In this section, the iPhone module of the Future Vision library allows you to control the 5 led graphics in the application according to the codes you write with the iPhone module and you can change the colors of the 5 leds to green, blue and red. You can use led_on(pin) to turn on the leds in the application and led_off(pin) to turn them off.
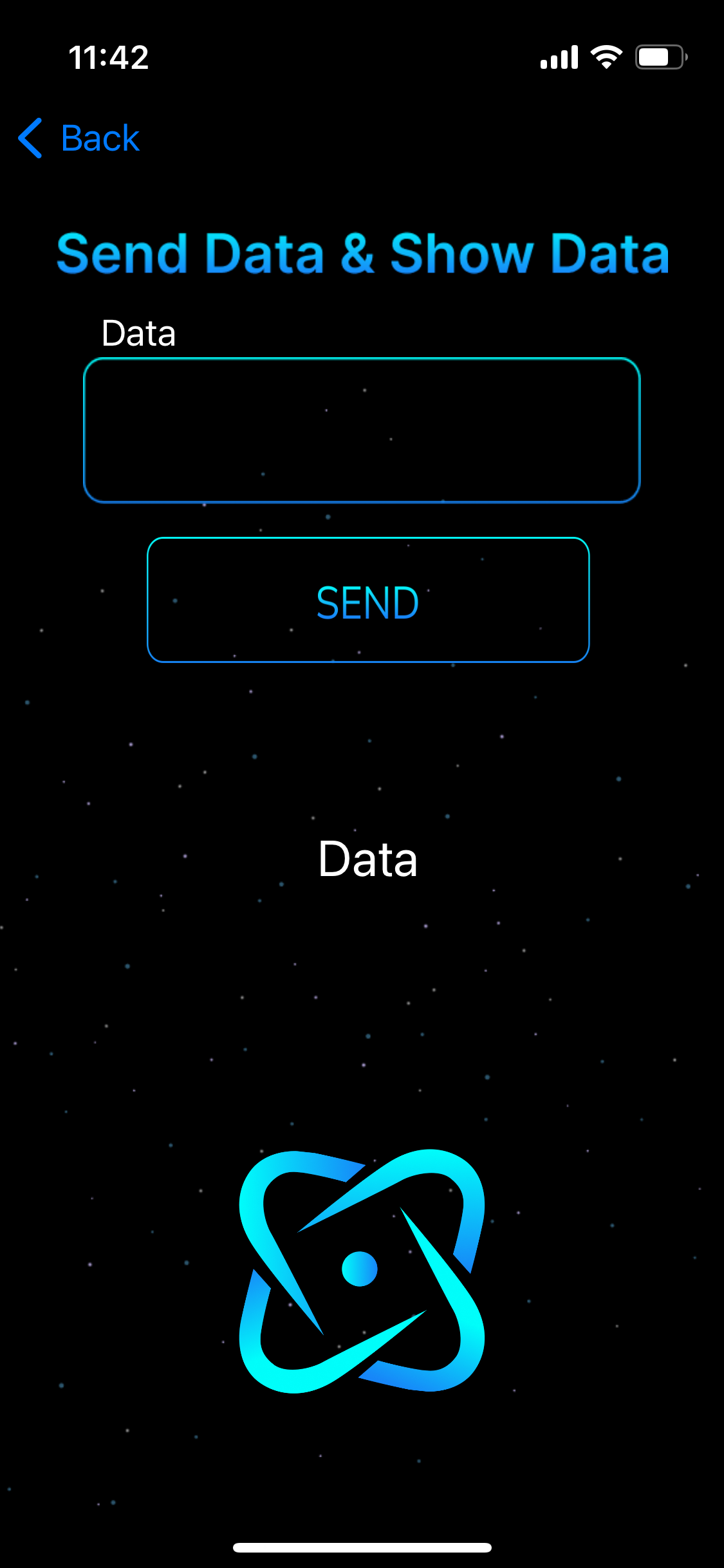
SEND&SHOW
In this section, according to the codes you will write with the iPhone module of the future vision library, you can send the data you will enter in the input in the application to your computer or send data from your computer to the mobile application. you can use send_data(data) functions to send data to the mobile application and read_data() functions to read the data sent by the mobile application.
Sample Codes
HWC
Flash Controlled
from futurevision import iphone
iphone=iphone.iPhone()
while True:
iphone.flash_on()
iphone.wait(3)
iphone.flash_off()
iphone.wait(3)
Screen Brightness Controlled
from futurevision import iphone
iphone=iphone.iPhone()
while True:
iphone.screen_brightness(100)
iphone.wait(3)
iphone.screen_brightness(0)
iphone.wait(3)
Volume Controlled
from futurevision import iphone
iphone=iphone.iPhone()
while True:
iphone.volume_intensity(100)
iphone.wait(3)
iphone.volume_intensity(0)
iphone.wait(3)
CwH
Reading Data from iPhone Observational Hardware
from futurevision import iphone
iphone=iphone.iPhone()
while True:
data=iphone.read_data()
print(data)
Reading iPhone Observational Hardware DataThe first index in the index order of the list represents the screen brightness, the second index represents the volume, and the third index represents the volume up button pressed on the phone
['25', '70', 'Down']
['25', '75', 'Up']
LEDs
from futurevision import iphone
iphone=iphone.iPhone()
while True:
iphone.led_on(1)
iphone.led_on(2)
iphone.led_on(3)
iphone.led_on(4)
iphone.led_on(5)
iphone.wait(3)
iphone.led_off(1)
iphone.led_off(2)
iphone.led_off(3)
iphone.led_off(4)
iphone.led_off(5)
iphone.wait(3)
Change Drawing Color
Read Data
from futurevision import iphone
iphone=iphone.iPhone()
while True:
data=iphone.read_data()
print(data)
Send Data
from futurevision import iphone
iphone=iphone.iPhone()
while True:
iphone.send_data("Future Vision")
Social Media



License