Security News
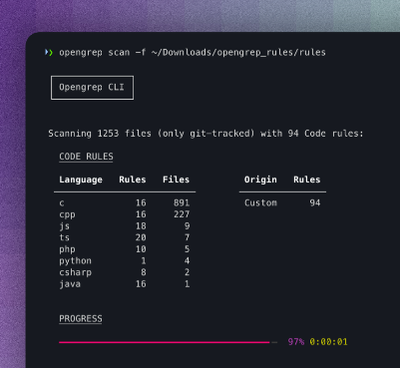
Opengrep Emerges as Open Source Alternative Amid Semgrep Licensing Controversy
Opengrep forks Semgrep to preserve open source SAST in response to controversial licensing changes.
By Sarah Gooding - Jan 28, 2025
Enable to struct movement robotic action with ROS, the open-source robotic middleware. This library make able to run that by Python3 code on external of ROS network and workspace.
This is depended roslibpy that allows ROS programing without defining as ROS Node by using rospy.
To install rosmobilelib, use pip:
pip install rosmobilelib
or
pip install rosmobilelib --extra-index-url https://test.pypi.org/simple
Details coming soon. For now, just watch down and get through it.
Import libraries.
import roslibpy as rlp
from rosmobilelib import MobileClient
Prepare connection with roslibpy. If you desire details see here.
client = rlp.Ros('localhost', port=9090)
lm1 = lambda: print('is ROS connected: ', client.is_connected)
client.on_ready(lm1)
client.run()
Define MobileClient object and wait for to subscribe needs topics.
lm2 = lambda r: print('reached goal', r)
ms = MobileClient(client, lm2, odom_topic='/odom', map_topic='/map')
ms.wait_for_ready()
Use dynamic FCFS scheduler. Set goal and make able to execute goals. You can set goal any time not only after call start().
Details:
ms.start()
# set scheduler a goal that go ahead 0.5 from robot body
ms.set_goal_relative_xy(0.5, 0, is_dynamic=False)
# set relative pos(x:front:-0.5, y:left:1) based basis vector that decided dynamic after previous executed
ms.set_goal_relative_xy(-0.5, 1, is_dynamic=True)
# set goal directly with world frame's pose
ms.set_goal(ms.get_vec_q(-0.4,-0.6,0), ms.get_rot_q(0,0,math.pi/2))
time.sleep(60)
ms.stop()
There are other way to wait for time until reach goal. Exchange time.sleep(n) to ms.wait_for_execute_all().
...
ms.wait_for_execute_all()
...
FAQs
rosmobilelib
We found that rosmobilelib demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
Opengrep forks Semgrep to preserve open source SAST in response to controversial licensing changes.
Security News
Critics call the Node.js EOL CVE a misuse of the system, sparking debate over CVE standards and the growing noise in vulnerability databases.

Security News
cURL and Go security teams are publicly rejecting CVSS as flawed for assessing vulnerabilities and are calling for more accurate, context-aware approaches.