ADAM Simulator
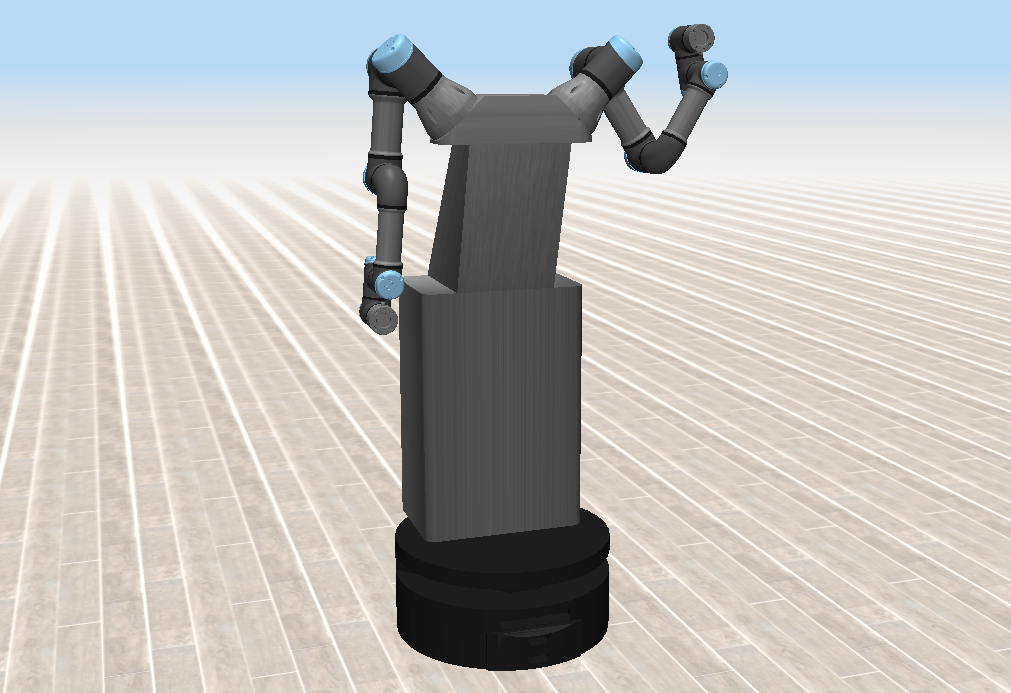



ADAM (Autonomous Domestic Ambidextrous Manipulator) is a mobile robot manipulator consisting of a base with two Degrees of Freedom (DoF) and two Universal Robots UR3 of 6 DoF each.
The simulation was built using MuJoCo, a free and open source physics engine designed from the ground up for the purpose of model-based optimization, and in particular optimization through contacts.
Installation
Follow the next steps for installing the simulation on your device.
Requierements:
Note: The Adam Simulator works on Linux, Windows and Mac.
Install miniconda (highly-recommended)
It is highly recommended to install all the dependencies on a new virtual environment. For more information check the conda documentation for installation and environment management. For creating the environment use the following commands on the terminal.
conda create -n adam python==3.10.9
conda activate adam
Install from pip
The ADAM simulator is available as a pip package. For installing it just use:
pip install adam-sim
Install from source
Firstly, clone the repository in your system.
git clone https://github.com/vistormu/adam_simulator.git
Then, enter the directory and install the required dependencies
cd adam_simulator
pip install -r requirements.txt
Installation for the communication
The communication uses mosquitto as a broker. For installing it on your system, follow the instructions on the mosquitto website.
It is also necessary to install docker. For more information check the docker documentation.
Documentation
The official documentation of the package is available on Read the Docs. Here you will find the installation instructions, the API reference and some minimal working examples.



