Security News
PyPI’s New Archival Feature Closes a Major Security Gap
PyPI now allows maintainers to archive projects, improving security and helping users make informed decisions about their dependencies.
By Sarah Gooding - Jan 30, 2025
![]()
An advanced PID controller in Python. The derivative term can also be used in practice thanks to built-in first-order filter. Detailed information can be found here.
Usage is very simple:
from advanced_pid import PID
# Create PID controller
pid = PID(Kp=2.0, Ki=0.1, Kd=1.0, Tf=0.05)
# Control loop
while True:
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
reference = 1.0
control = pid(timestamp, reference - measurement)
# Feed control signal to system
system.set_input(control)
Complete API documentation can be found here.
Biggest advantage of advanced-pid, the derivative term has a built-in first-order
filter.
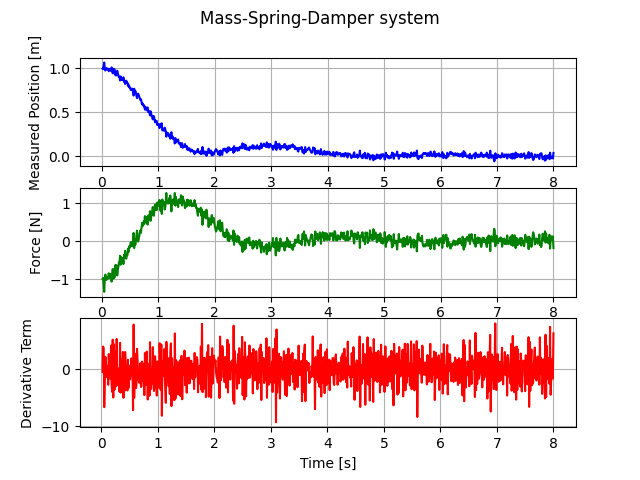
advanced-pid package includes a toy mass-spring-damper system model for testing:
from advanced_pid import PID
from advanced_pid.models import MassSpringDamper
from matplotlib import pyplot as plt
from numpy import diff
# Create a mass-spring-damper system model
system = MassSpringDamper(mass=1.0, spring_const=1.0, damping_const=0.2)
system.set_initial_value(initial_position=1.0, initial_velocity=0.0)
# Create PID controller
pid = PID(Kp=1.0, Ki=0.0, Kd=2.0, Tf=0.5)
# Control loop
time, meas, cont = [], [], []
for i in range(800):
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
control = pid(timestamp, -measurement)
# Feed control signal to system
system.set_input(control)
# Record for plotting
time.append(timestamp)
meas.append(measurement)
cont.append(control)
# Plot result
fig, (ax1, ax2, ax3) = plt.subplots(3, 1)
fig.suptitle('Mass-Spring-Damper system')
ax1.set_ylabel('Measured Position [m]')
ax1.plot(time, meas, 'b')
ax1.grid()
ax2.set_ylabel('Force [N]')
ax2.plot(time, cont, 'g')
ax2.grid()
ax3.set_xlabel('Time [s]')
ax3.set_ylabel('Derivative Term')
ax3.plot(time[1:], diff(meas)/diff(time), 'r')
ax3.grid()
plt.show()
As It can be seen in the figure, derivative term cannot be use without a filter:
To install, run:
pip3 install advanced-pid
To run tests, run:
python -m unittest tests.test_pid
Licensed under the MIT License.
FAQs
Unknown package
We found that advanced-pid demonstrated a healthy version release cadence and project activity because the last version was released less than a year ago. It has 1 open source maintainer collaborating on the project.
Did you know?

Socket for GitHub automatically highlights issues in each pull request and monitors the health of all your open source dependencies. Discover the contents of your packages and block harmful activity before you install or update your dependencies.
Security News
PyPI now allows maintainers to archive projects, improving security and helping users make informed decisions about their dependencies.

Research
Security News
Malicious npm package postcss-optimizer delivers BeaverTail malware, targeting developer systems; similarities to past campaigns suggest a North Korean connection.
Security News
CISA's KEV data is now on GitHub, offering easier access, API integration, commit history tracking, and automated updates for security teams and researchers.