DeepFly3D




DeepFly3D is a PyTorch and PyQT5 implementation of 2D-3D tethered Drosophila pose estimation. It aims to provide an interface for pose estimation and to permit further correction of 2D pose estimates, which are automatically converted to 3D pose.
DeepFly3D does not require a calibration pattern, it enforces geometric constraints using pictorial structures, which corrects most of the errors, and the remaining errors are automatically detected can be dealt manually with GUI.
Table of Contents
Extras:
Installing
Installing with pip
Create a new anaconda environment, and pip install df3d package.
conda create -n df3d python=3.6
conda activate df3d
pip install df3d
Old CUDA Drivers
Only in case your cuda driver is not up-to-date, additionally you might need to explicitly install cudatoolkit before pip installing df3d:
conda install pytorch torchvision torchaudio cudatoolkit="YOUR_CUDA_VERSION" -c pytorch
Installing from the source
DeepFly3D requires Python3, Anaconda environment and CUDA drivers for installation. It is only tested on Ubuntu and MacOS. First, clone the repository:
git clone https://github.com/NeLy-EPFL/DeepFly3D
cd DeepFly3D
Then, run create a conda environment with
conda create -n df3d python=3.6
which will create a new python environment. Then, activate the environment.
conda activate df3d
Once this is done you can install the df3d package with the following command,
pip install -e .
which uses the setup.py function to create the package.
Make sure you also have installed the CUDA drivers compatible with your GPU, otherwise it is not possible to make 2D predictions. You can check how to install CUDA drivers here: https://developer.nvidia.com/cuda-downloads
Data Structure
The inteded usage of DeepFly3D is through command-line-intarface (CLI).
df3d-cli assumes there are videos or images in this format under the folder.
if your path /your/image/path has images or videos, df3d-cli will run 2D pose estimation, calibration and triangulation and will save 2d pose, 3d pose and calibration parameters under the folder /your/image/path/df3d.
Idealy you would have images or videos under images/ folder, with the specific naming convention:
.
+-- images/
| +-- camera_0_img_0.jpg
| +-- camera_1_img_0.jpg
| +-- camera_2_img_0.jpg
| +-- camera_3_img_0.jpg
| +-- camera_4_img_0.jpg
| +-- camera_5_img_0.jpg
| +-- camera_6_img_0.jpg
...
or
.
+-- images
| +-- camera_0.mp4
| +-- camera_1.mp4
| +-- camera_2.mp4
| +-- camera_3.mp4
| +-- camera_4.mp4
| +-- camera_5.mp4
| +-- camera_6.mp4
In case of mp4 files, df3d will first expand them into images using ffmpeg. Please check the sample data for a real exampe: https://github.com/NeLy-EPFL/DeepFly3D/tree/master/sample/test
Basic Usage
The basic usage is like this.
df3d-cli /your/image/path \
--order 0 1 2 3 4 5 6
camera order stands for the selection of cameras. The default camera ordering (0 1 2 3 4 5 6) stands for this. In case you have some other order, then you need to tell which order.
Originally.

Then if you have the following order, your
So for example, if your data looks like this, then your order should be 6 5 4 3 2 1 0.
Advanced Usage
usage: df3d-cli [-h] [-v] [-vv] [-d] [--output-folder OUTPUT_FOLDER] [-r] [-f]
[-o] [-n NUM_IMAGES_MAX]
[-order [CAMERA_IDS [CAMERA_IDS ...]]] [--video-2d]
[--video-3d] [--skip-pose-estimation]
INPUT
DeepFly3D pose estimation
positional arguments:
INPUT Without additional arguments, a folder containing
unlabeled images.
optional arguments:
-h, --help show this help message and exit
-v, --verbose Enable info output (such as progress bars)
-vv, --verbose2 Enable debug output
-d, --debug Displays the argument list for debugging purposes
--output-folder OUTPUT_FOLDER
The name of subfolder where to write results
-r, --recursive INPUT is a folder. Successively use its subfolders
named 'images/'
-f, --from-file INPUT is a text-file, where each line names a folder.
Successively use the listed folders.
-o, --overwrite Rerun pose estimation and overwrite existing pose
results
-n NUM_IMAGES_MAX, --num-images-max NUM_IMAGES_MAX
Maximal number of images to process.
-order [CAMERA_IDS [CAMERA_IDS ...]], --camera-ids [CAMERA_IDS [CAMERA_IDS ...]]
Ordering of the cameras provided as an ordered list of
ids. Example: 0 1 4 3 2 5 6.
--video-2d Generate pose2d videos
--video-3d Generate pose3d videos
--skip-pose-estimation
Skip 2D and 3D pose estimation
Therefore, you can create advanced queries in df3d-cli, for example:
df3d-cli -f /path/to/text.txt \
-r \
--order 0 1 2 3 4 5 6 \
-n 100 \
--output-folder results \
--vv \
--skip-pose-estimation \
--video-2d \
--video-3d \
To test df3d-cli, you run it on a folder for only 100 images, make videos, and print agressivelly for debugging:
df3d-cli /path/to/images/ -n 100 -vv -order 0 1 2 3 4 5 6
Python Interface
Optionally, you can also use df3d on directly python.
from df3d.core import Core
from df3d import video
core = Core(input_folder='../sample/test/', num_images_max=100, output_subfolder='df3d_py', camera_ordering=[0,1,2,3,4,5,6])
core.pose2d_estimation()
core.calibrate_calc(min_img_id=0, max_img_id=100)
core.save()
video.make_pose2d_video(
core.plot_2d, core.num_images, core.input_folder, core.output_folder
)
video.make_pose3d_video(
core.get_points3d(),
core.plot_2d,
core.num_images,
core.input_folder,
core.output_folder,
)
In general following functions are available for Core module:
class Core:
def __init__(self, input_folder, num_images_max):
def setup_cameras(self):
@property def input_folder(self):
@property def output_folder(self):
@property def image_shape(self):
@property def number_of_joints(self):
def has_pose(self):
def has_heatmap(self):
def has_calibration(self):
def update_camera_ordering(self, cidread2cid):
def pose2d_estimation(self):
def next_error(self, img_id):
def prev_error(self, img_id):
def calibrate_calc(self, min_img_id, max_img_id):
def nearest_joint(self, cam_id, img_id, x, y):
def move_joint(self, cam_id, img_id, joint_id, x, y):
def save_calibration(self):
def save_pose(self):
def save_corrections(self):
def plot_2d(self, cam_id, img_id, with_corrections=False, joints=[]):
def plot_heatmap(self, cam_id, img_id, joints=[]):
def get_image(self, cam_id, img_id):
def next_error_in_range(self, range_of_ids):
def get_joint_reprojection_error(self, img_id, joint_id, camNet):
def joint_has_error(self, img_id, joint_id):
def solve_bp_for_camnet(self, img_id, camNet):
Videos
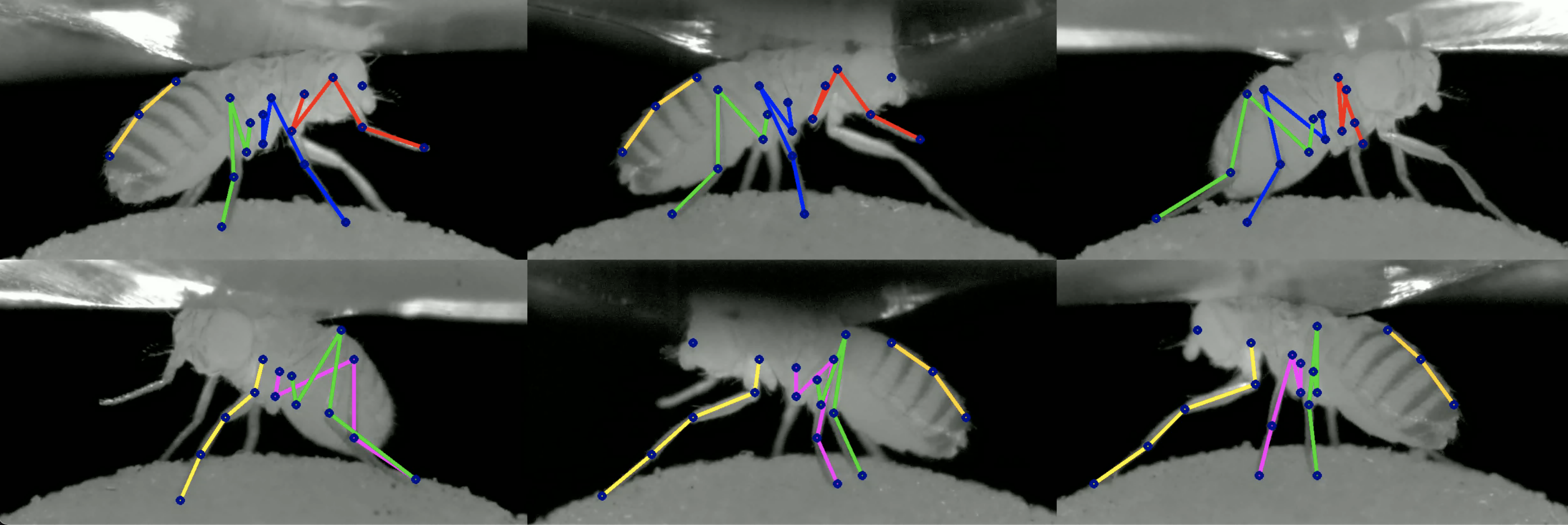
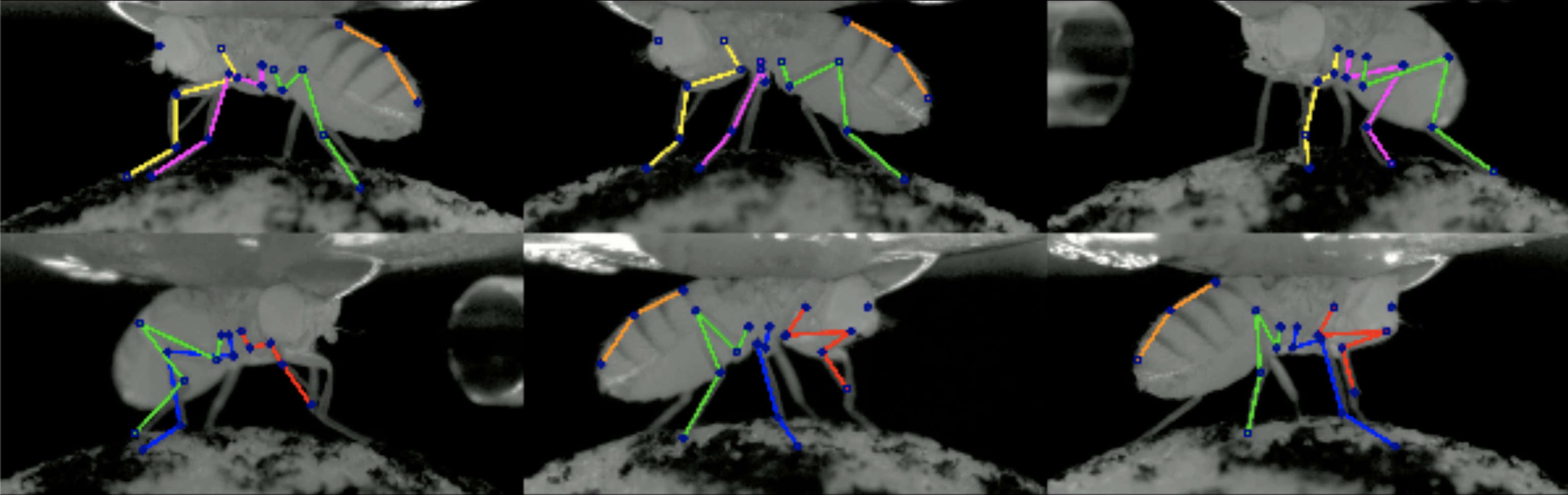
Using the flag --video-2d with df3d-cli will create the following video:

Using the flag --video-3d with df3d-cli will create the following video:

Output
df3d-cli saves results under df3d_result.pk file. You can read it using,
result_path = '../sample/test/df3d/df3d_result*.pkl'
d = pickle.load(open(glob.glob(pr_path)[0], 'rb'))
This will read a dictionary with the following keys:
d.keys()
>>> dict_keys([0, 1, 2, 3, 4, 5, 6, 'points3d', 'points2d', 'points3d_wo_procrustes', 'camera_ordering', 'heatmap_confidence'])
Points2D
You can also visualize which keypoints in results belongs to which keypoints on the animal:
import matplotlib.pyplot as plt
image_path = '../sample/test/camera_{cam_id}_img_{img_id}.jpg'
pr_path = '../sample/test/df3d/df3d_result*.pkl'
plt.imshow(plt.imread(image_path.format(cam_id=0,img_id=0)))
plt.axis('off')
for i in range(19):
x, y = d['points2d'][0, 0][i, 1] * 960, d['points2d'][0, 0][i, 0] * 480
plt.scatter(x, y, c='blue', s=5)
plt.text(x, y, f'{i}', c='red')


Camera Ordering
The same camera ordering as given input using --order flag in cli.
d["camera_ordering"]
>>> array([0, 1, 2, 3, 4, 5, 6])
Heatmap Confidence
Stacked Hourglass confidence values for each joint predicted. Given an unnormalized posterior distribution heatmap H over the pixels, we take the argmax_{h, w} H for the final prediction and H[h, w] for the confidence level.
Calibration
df3d_result files also have the calculated calibration parameters for each camera. Each calibration section includes
- rotation matrix R
- translation vector tvec,
- intrinsic matrix intr,
- distortion parameters distort.
calib = {0: {'R': array([[ 0.90885957, 0.006461 , -0.41705219],
[ 0.01010426, 0.99924554, 0.03750006],
[ 0.41697983, -0.0382963 , 0.90810859]]),
'tvec': array([1.65191596e+00, 2.22582670e-02, 1.18353733e+02]),
'intr': array([[1.60410e+04, 0.00000e+00, 2.40000e+02],
[0.00000e+00, 1.59717e+04, 4.80000e+02],
[0.00000e+00, 0.00000e+00, 1.00000e+00]]),
'distort': array([0., 0., 0., 0., 0.])},
1: {'R': array([[ 0.59137248, 0.02689833, -0.80594979],
[-0.00894927, 0.9996009 , 0.02679478],
[ 0.80634887, -0.00863303, 0.59137718]]),
'tvec': array([ 1.02706542e+00, -9.25820468e-02, 1.18251732e+02]),
'intr': array([[1.60410e+04, 0.00000e+00, 2.40000e+02],
[0.00000e+00, 1.59717e+04, 4.80000e+02],
[0.00000e+00, 0.00000e+00, 1.00000e+00]]),
'distort': array([0., 0., 0., 0., 0.])},
}
Running GUI
GUI is primarily used for correcting the false 2D pose estimation results in the 'Correction' mode. Your changes will be saved under df3d folder and will be used for the final df3d_result file.
Currently, you can only use GUI after running the df3d on the cli on the same folder.
After installing the dependencies we can initialize the GUI using the command line entry point:

df3d ./data/test/ 15
The second argument sets the image folder, while the third argument sets the upper bound for the images, in case you only want to process the subset of images.
This should start the GUI:

you can optionally remove /FULL/PATH_FOLDER and NUM_IMAGES, in which case pop-up apperas the select the folder.

After completing pose estimation in the cli, you can open the pose mode:

Development
DeepFly3D consists of 3 pip packages:
The master branch of the DeepFly3D package is kept up-to-date with the last version of the pip package. Development is done under dev branch. Before pushing changes to the master branch, make sure all test cases are passing. You can run the tests using python test.py. Unittests make sure several scenarios can be processed using cli without failing.
References
@inproceedings{Gunel19DeepFly3D,
author = {Semih G{\"u}nel and
Helge Rhodin and
Daniel Morales and
João Compagnolo and
Pavan Ramdya and
Pascal Fua},
title = {DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila},
bookTitle = {eLife},
doi = {10.7554/eLife.48571},
year = {2019}
}
Version History
Changes in 0.5
Changes in 0.4
- Using the CLI, the output folder can be changed using the
--output-folder flag - CLI and GUI now use the same pose estimation code, so changes will automatically propagate to both
- Minor tweaks in the GUI layout, functionality kept unchanged
Changes in 0.3
- Results are saved in df3d folder instead of the image folder.
- Much faster startup time.
- Cameras are automatically ordered using Regular Expressions.
- CLI improvements. Now it includes 3D pose.
Changes in 0.2
- Changing name from deepfly3d to df3d
- Adding cli interface with df3d-cli
- Removing specific dependencies for numpy and scipy
- Removing L/R buttons, so you can see all the data at once
- Removing the front camera
- Faster startup time, less time spent on searching for the image folder
- Better notebooks for plotting
- Adding procrustes support. Now all the output is registere to template skeleton.
- Bug fixes in CameraNetwork. Now calibration with arbitrary camera sequence is possible.



